V
主页
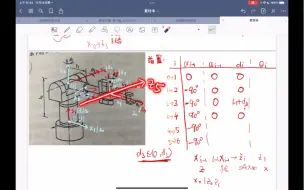
快速掌握机器人运动学(9-10:机器人运动学正方程)
发布人
机器人运动学正方程较为简单,通常由唯一正解
打开封面
下载高清视频
观看高清视频
视频下载器
机器人DH法、运动学、雅克比(Jacobian)矩阵
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
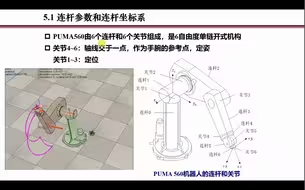
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
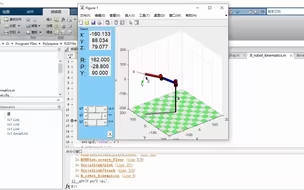
【机器人正运动学详细推导过程】+机器人工具箱仿真验证
机器人运动学-逆运动学
机器人学期末速成考试不挂科|考研复试速成/期末交个朋友
3-11运动学逆解
成都文理学院,男女朋友吵架,男的当场手抓饼,结果结果结果~¥#
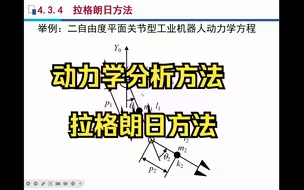
机器人动力学拉格朗日法详细推导(二连杆机械臂)
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》
【机器人机构学】DH参数法讲解-基于定义出发
【第1部分】机器人运动学
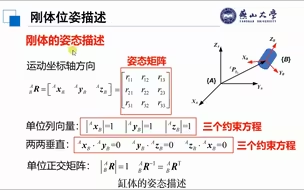
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
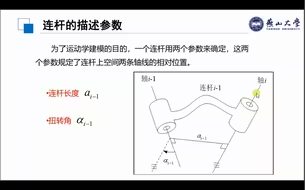
机器人学 l 3.1 连杆参数和关节变量
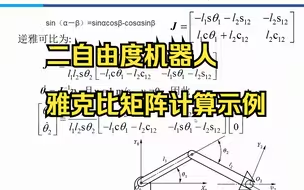
4-3二自由度机器人雅克比矩阵计算示例
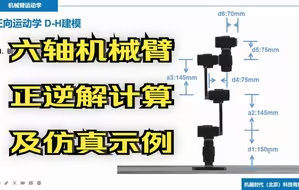
全程干货【六轴机械臂正逆解计算及仿真示例】
个人讲解学习-机器人的正运动学和逆运动学
『机器人技术』复习课
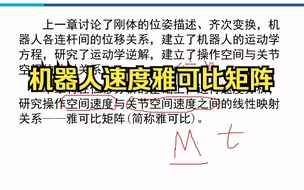
4-1机器人速度雅可比矩阵
台大机器人学之动力学——林沛群
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
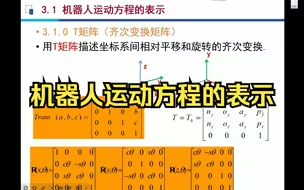
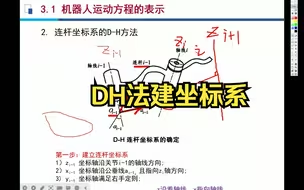
3-2机器人运动方程的表示
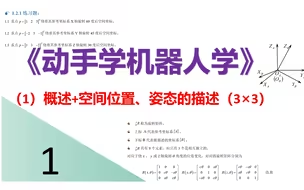
(1)概述|空间位置、姿态的描述(3×3)|《动手学机器人学》
4-15动力学分析方法-拉格朗日方法
66岁老头,近20个月发工控初级小视频400+,近30天收益5.27元。经济较差,共克时艰
计算矩阵乘法的小技巧
3-3DH法建坐标系
近7天日均收益4毛6,工控老人66岁,“爱”将用尽,难以“发电”
尖勾传媒CEO的一天是怎么度过的?
快速掌握机器人运动学(1-10:学习目的、实现方法)
《动手学机器人学》(3)-齐次坐标与变换矩阵
被工作摧残的18岁少女!不仅晒出斑还要被黄毛领导骂…….半年秒变黄脸婆
近7天收益3.21元,日均收入0.46元,不足以支付电费,“爱”将用尽,难以“发电”
快速掌握机器人运动学(10-10:机器人运动学逆方程)
【第2部分】机器人动力学
卧铺车厢中,小学生和研究生的公德水准高低立判