V
主页
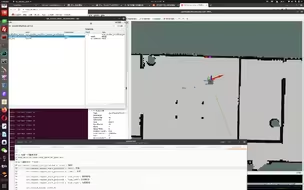
slam无人车web端2d地图缩放,拖动
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
slam无人车重复定位精度+-0.5cm
slam无人车通过上摄像头扫描二维码实现重定位
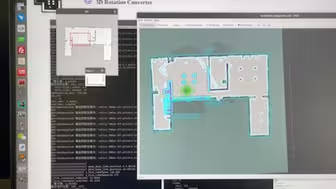
slam无人车3d地图显示
slam无人车使用扩展卡尔曼滤波器融合imu 与未做融合imu 的效果对比
slam无人车全局路径规划(10)
slam无人车通用底盘系统工具1
slam无人车3d地图显示
slam无人车2d地图显示
slam无人车自动充电功能
slam无人车全局路径规划,转角处路径做圆弧处理(4)
slam无人车静态自动重定位,动态重定自动位同时研发成功,国内首创。
slam无人车之自动回充点云分割
用qt开发的slam无人车调试工具
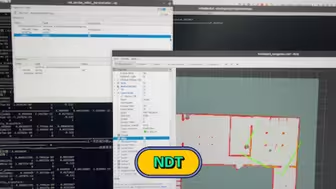
slam无人车通过点云匹配实现重定位功能
slam导航定位精度达到+-1cm
slam 无人车web端显示跟踪
slam无人车通过uwb 实现重定位算法
slam 无人车自动回充之点云匹配
slam无人车充电桩识别
slam 无人车scan雷达数据转成图片
slam无人车UWB重定位算法实现
slam无人车Foxglove Studio与webviz 工具
slam无人车通用底盘web端工具5
slam无人车用图像特征做重定位
slam无人车设置虚拟墙功能
slam无人车全局路径规划,指定点位生成路径(2)
slam无人车自动回充之点云匹配充电桩
slam无人车40000条数据压测调试助手,点到点导航
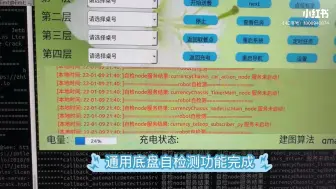
slam无人车web端实现自检测功能
SLAM无人车计算地图坐标,图片像素坐标公式推导
slam无人车全局路径规划,指定点位生成多条路径(3)
slam无人车通用底盘web端工具4
slam无人车基于点云匹配充电桩的自动回充功能
amcl融合icp
slam无人车自动调整车身与墙的距离及姿态
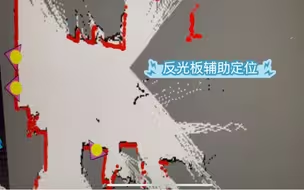
agv反光板定位,反光柱定位,slam无人车通过反光板辅助定位算法及web端可视化
slam无人车,全局路径规划算法(1)
slam无人车残影清楚功能
slam无人车web端一键升级功能