V
主页
京东 11.11 红包
no.1绪论
发布人
一些事情的说明,希望得到大家的支持
打开封面
下载高清视频
观看高清视频
视频下载器
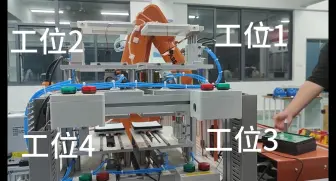
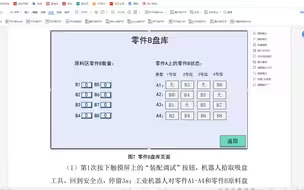
一种解决四工位随机顺序随机结果检测的方法
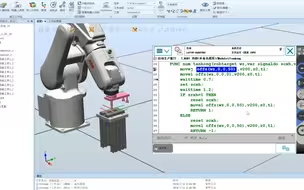
ABB机器人定制码垛整体思路讲解-机器人部分
不编一行程序实现ABB机器人启动、降速、急停
abb机器人实时显示当前角速度与线速度
芯片分拣思路讲解-以金砖国家赛题为例
利用宏从字符输入中提取信息
定制涂胶与涂胶解决思路
一种解决四工位随机顺序随机结果检测的方法----优化版
维纶通宏指令应用-账户登录
维纶通宏程序触摸屏应用:开始/暂停计时及清零操作
芯片分拣思路讲解-以金砖国家赛题为例(部分流程实机演示)
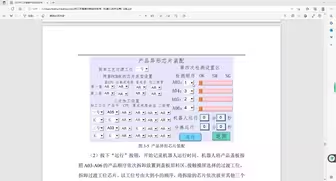
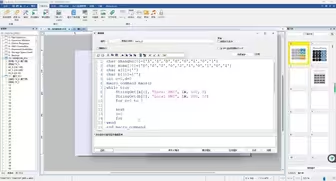
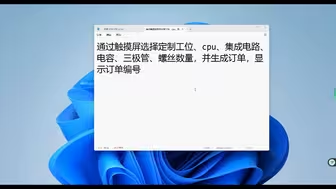
维纶通触摸屏宏程序实现订单编号生成与实时显示
ABB机器人基于TCP和ZX法标定工具坐标系,实现一次对点多工具使用
ABB机器人在随机数组中找随机数
ABB机器人利用吸盘探测随机垛型
复杂芯片分拣-随机两工位对应随机两板号解决方法
ABB机器人利用带参数功能程序实现码垛及芯片探空
基于威纶通触摸屏宏程序完成随机工位1-4手动控制
欧姆龙视觉系统宏指令应用-盖板检测
ABB机器人基于cross connection与system output实现机器停止输出就立即停止 ——以激光发生器为例
欧姆龙视觉系统-一个场景完成芯片种类及类型检测
abb机器人负数与超过255大数字的数据处理(非packrawbytes)
ABB机器人两分钟完成io配置及化名io指令的使用
ABB机器人急停降速计时便捷方法
利用宏实现显示4工位物料状态 威纶通触摸屏显示汉字
ABB机器人利用带参数子程序完成与PLC数据收发
ABB机器人利用带参数子程序实现安放(吸放、夹取)工具及工件
2024中鸣超轨赛 Super Ai E6 全任务方案
想了想,还是建个群吧😄
利用宏程序实现生产优化任务中柱状图的相关任务要求 (实时更新、最大值、最小值、平均值)
▲ 五 大 学 科 竞 赛 最 晚 入 坑 时 间 ▲
三创赛炮灰选题,挑战杯、互联网+避雷,附获奖案例
一个视频讲清楚什么是【三创赛】,附创赛获奖案例
10-12月大学生高质量竞赛合集!综测加分、评奖评优、直通面试,建议收藏!
第七章ABB机器人程序编写(三)
尽早参加这4个国家级竞赛!!是我大一最明智的决定…
机械臂运用起来了吗?| 智慧搬运侠 || 2023国际青年人工智能大赛
东方航空第3届乘务员职业技能竞赛现场
当我的同桌是竞赛生
【省一作品】水下机器人——浙江省第八届机器人竞赛