V
主页
京东 11.11 红包
今儿个读一条评论。准备弄头发cos跳段街舞 来个倒立 ቼ 再来一段ዽ ጿ ኈ ቼ
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
机器人学 3.22 双直角机械臂的变形(求解动力学方程)
机器人学 3.15 拉格朗日动力学(矩阵形式推导)(较难)
机器人学 3.25 平行四边形机械臂的动力学方程
机器人学 3.14 机械臂总势能的计算
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
机器人学 3.23 平面2R机械臂的动力学方程
机器人学 3.6 牛顿欧拉递推动力学算法
机器人学 3.24 平行四边形机械臂的建模
机器人学 3.17 进一步理解拉格朗日动力学方程
机器人学 3.3 牛顿欧拉递推动力学算法的前置知识1
赛车多连杆悬架动力学仿真分析
【25工训】【物流小车】【电机控制】太强了!这车太无敌辣!!!
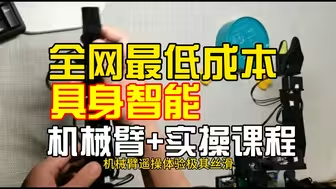
全网最低成本—具身智能机械臂+实操课程
机器人学 3.16 拉格朗日动力学方程(分量形式推导)
机器人学 3.13 机械臂的动能计算及惯性矩阵
机器人学 2.21 一个机械臂奇异性的例子
机器人学 1.22 用改进DH参数建模Aubo机器人
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
机器人学 2.1 刚体的线速度和角速度
机器人学 3.20 机械臂的李雅普诺夫函数稳定性
机器人学 3.19 机械臂系统的无源性
基于Transformer开源通用动力学模型驱动轮式机器人敏捷控制
机器人学 1.1 左乘(pre-multiply)的意义
机器人学 3.18 惯性矩阵和科氏力离心力矩阵的关系
机器人学 3.7 牛顿欧拉递推动力学算法2
机器人学 3.5 牛顿欧拉递推动力学算法前置知识3
机器人学 3.12 构建L_i的雅可比矩阵(MDH)
机器人学 3.4 牛顿欧拉递推动力学算法前置知识2
机器人学 2.22 使用ZYZ欧拉角来构建分析雅可比矩阵
机器人学 1.20 用标准DH参数建模Aubo机械臂
【电机使用反馈】CubeMars电机
机器人学 3.1 拉格朗日动力学的数学推导
机器人学 2.14 矢量积法求解2R机械臂的雅可比矩阵
机器人学 3.9 牛顿欧拉算法(MDH)的一些例题
机器人学 1.3 左乘右乘同时作用于当前坐标系的情况
机器人学 3.8 牛顿欧拉算法的静力分析
机器人学 3.11(接2.15) 作用于中间刚体的雅可比矩阵构建
机器人学 2.11 使用改进DH建模后用微分变换法求解2R机械臂的雅可比矩阵
机器人学 2.17 末端速度递推式求解2R机械臂的速度雅可比矩阵(MDH)
机器人学 2.2 微分运动