V
主页
机器人学 1.20 用标准DH参数建模Aubo机械臂
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人】机械臂建模开发: 基于模型的设计方法总结 - MATLAB&Simulink
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
【机器人】机械臂建模开发: 工作流程 - MATLAB&Simulink
机器人学 1.1 左乘(pre-multiply)的意义
机器人学 2.8 使用标准DH通过微分变换法构建雅可比矩阵TJ
我们把ALOHA机器人和多模态大模型结合了起来,来看看效果如何?
当大模型遇上了机械臂
【机器人】机械臂建模开发: 如何建立系统和环境模型? - MATLAB&Simulink
机器人学 1.18 标准DH 和 改进DH的区别
机器人学 1.3 左乘右乘同时作用于当前坐标系的情况
机器人学 2.9 使用改进DH通过微分变换法构建雅可比矩阵TJ
机器人学 2.14 矢量积法求解2R机械臂的雅可比矩阵
机器人学 1.22 用改进DH参数建模Aubo机器人
机器人学 2.11 使用改进DH建模后用微分变换法求解2R机械臂的雅可比矩阵
机器人学 1.21 改进DH参数
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
Unity matlab 通信 机械臂控制
机器人学 1.2 右乘 (post-multiply) 的意义
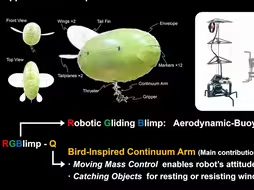
RGBlimp-Q: A Robotic Gliding Blimp with Bioinspired Continuum Arm
工业机器人三轴机械臂模型
ROS2版DUMMY - Dummy ROS2支持的第一步 如何创建URDF文件
机械臂协调控制复现
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
机械臂视频
机器人学 1.6 齐次变换矩阵 T 的逆矩阵公式
NVIDIA RTX™ GPU 加速机器人仿真开发
机器人学 1.17 Euler 角
【机器人】机械臂建模开发: 如何实现机械臂和夹持器的控制以及任务调度?-MATLAB&Simulink
【机器人】机械臂建模开发: 如何让机器人感知环境并提取有效信息? - MATLAB&Simulink
机器人学 1.11 圆柱形坐标系(Cylindrical Coodinates)
Arduino控制的机械臂 - 保存/回放/导出/导入动作
【全面量产】超小型RV减速器及一体化伺服驱动关节
机器人学 1.15 Cartesian Coodinates + RPY
机械臂创意手舞!星海图超轻型力控机械臂A1现已正式发售,3.98万起!
机器人学 2.6 雅可比矩阵总述
机器人学 1.4 齐次变换矩阵求逆的引入
机器人学 3.20 机械臂的李雅普诺夫函数稳定性
机器人学 1.10 笛卡尔坐标系(Cartesian Coodinates)
开箱7自由度协作机械臂,AI视觉识别交互,玩转各种AI创意!
【疯疯】一套完整的码垛线运行流程,机械臂真棒。