V
主页
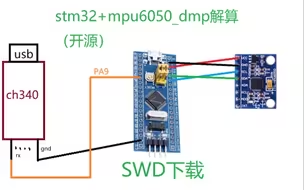
磁力计HMC5883学习小结
发布人
stm32 单片机程序 链接:https://pan.baidu.com/s/1yorR9mgrMLYNocPvpLBtsw 提取码:og3o --来自百度网盘超级会员V4的分享
打开封面
下载高清视频
观看高清视频
视频下载器
QMC5883模块
用STM32F103和磁传感器HMC5883L做的小作业,检测车辆通过并计数
mpu9250简易式磁力计校准
arduino hmc5883l 磁罗盘效果展示
mpu6050+hmc5883l+k64f姿态解算,方向余弦法,磁罗盘加速度计未校准。
8.3 hmc5883采集
IMU中加速度计、陀螺仪、磁力计的工作原理
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
【传感器融合】2:如何融合磁力计,加速度计和陀螺仪
STM32F103C8T6+QMC5883L。3V电池盒供电,干扰太严重了。先感受下吧。淘宝下单的是进口HMC5883L,发货给我的是国产,想起来还是郁闷。
esp32和霍尼韦尔HMC5883L磁力计,电子罗盘航向角测量
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
BMI160+QMC5883L校准视频
8.1 hmc5883介绍
HMC5883L磁力针在智能小车上的应用
维特智能三轴电子罗盘地磁传感器模块PNI磁力计航向角高灵敏度JYRM3100
【51模块库】5883电子指南针模块(磁力计) 驱动代码+使用范例
磁力计LIS2MDL开发(2)----电子罗盘
陀螺仪LSM6DSOW开发(8)----磁力计校准
STM32读取MPU9250姿态数据
历时一星期肝出一台电子指南针 电子罗盘
基于STM32单片机的电子罗盘毕业设计GPS定位与方位角显示
微型PCB设计:STM32磁力计+CAN总线
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
自制无人机1,磁力计校准的数学理论之最小二乘法
STM32F103ZE+MPU9250MPL姿态解算yaw轴不漂,移植的f4的程序
三轴磁场电子指南针罗盘传感器模块GY-273 HMC5883L控制器系统#单片机开发 #电子爱好者 #diy
磁力计LIS2MDL开发(3)----九轴姿态解算
磁力计
T173基于STM32单片机的电子罗盘指南针原理图PCB程序
小白向SlimeVR磁力计校准教程
【磁力计】穿越机中磁力计的作用
QMC5883L芯片做指南针
(开源)自制一款高精度电子秤
最小二乘法拟合---椭球拟合&磁力计校准
MEMS加速度计陀螺仪磁力仪如何工作+Arduino教程(中英字幕)[How To Mechatronics]
从零开始制作RoboMaster步兵机器人-25.加速度计,磁力计,陀螺仪使用mahony算法进行姿态解算融合四元数 开发板C型
了解传感器融合和跟踪,第二部分:融合磁力计、加速计和陀螺仪来估计方向
DIY无人机之飞控篇:磁力计调试&标定
手机如何知道方向?8分钟了解加速度计、陀螺仪和磁力计的原理