V
主页
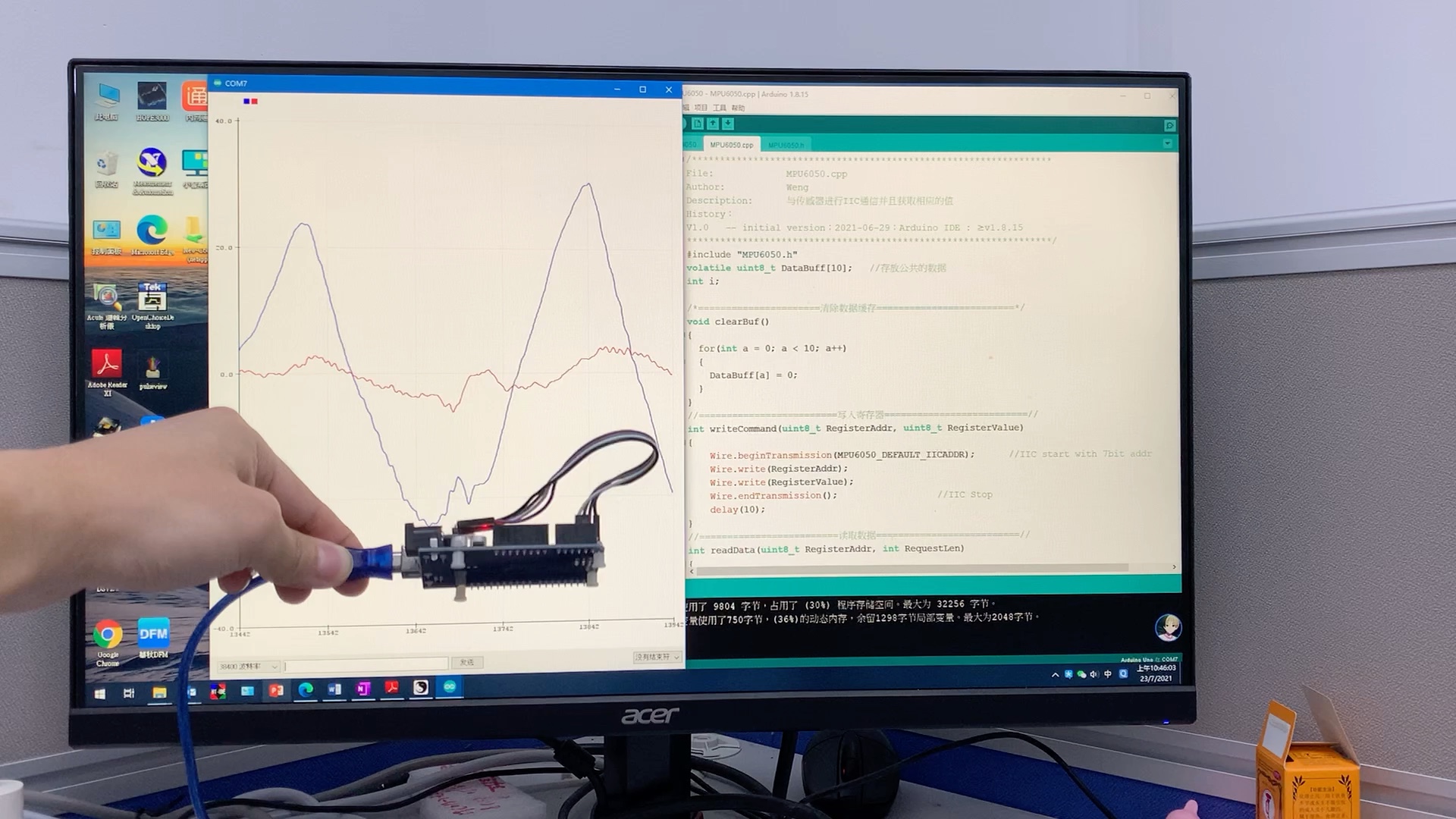
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
MPU6050陀螺仪+舵机云台控制
【新玩法】MPU6050传感器实现运动跟踪——略有难度
stm32f103+mpu6050陀螺仪,无人机飞行姿态解算,用匿名上位机显示出来
[免费开源]MPU6050四元数姿态解算
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
惯性传感器MPU9250(MPU6050、MPU9150兼容) mac上位机 实验
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
本来挺喜欢卡尔曼滤波的
使用 IMU(陀螺仪和加速度计)在 6DOF(俯仰、滚动、偏航和 x、y、z 位移)中进行步态跟踪
卡尔曼滤波解算欧拉角(附带封装好的源码)
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
stm32基于HAL库读取MPU6050-卡尔曼滤波姿态解算
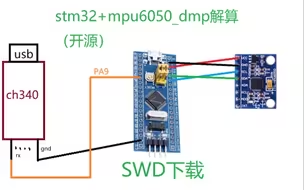
标准库DMP移植,MPU6050陀螺仪解算
【Arduino】MPU6050 测欧拉角 带卡尔曼滤波 自动修正yaw角(附代码)
陀螺仪MPU6050内部是如何实现陀螺仪效果的
高精度蓝牙陀螺仪 十轴姿态传感器IM948模块 动作捕捉 惯导振动倾角检测
陀螺仪丝滑转向环,可任意角度旋转
mpu6050 控制小车直线行驶,pid算法复位。
stm32 iic mpu6050 控制二维舵机跟随
全网首发MPU6050加速度陀螺仪控制4个方向的舵机|附代码
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
MPU6050陀螺仪使用教程(基于Arduino)
【求助】MPU6050使用DMP库yaw角不准
简单看看几十块的惯导和一万多的惯导
开源:max30102心率血氧+mpu6050陀螺仪+压力传感器+蓝牙模块,资料在简介里
LabNote: MPU6050 三轴陀螺仪实现手臂关节动作捕捉 + Blender 实时串流同步
【开源课程】5分钟搞懂加速度传感器MPU6050的使用方法
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
卡尔曼滤波器的C语言实践教程
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
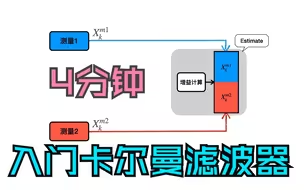
4分钟,入门卡尔曼滤波器
使用mpu6050陀螺仪,制作哈利波特互动魔杖,实现魔法梦
MPU6050陀螺仪加速度计波形显示与姿态显示
自平衡的双轮小车,通过MPU6050检测到姿态变化,处理器控制电机
6分钟,带你入门卡尔曼滤波器
(补录)mpu6050三种常见的滤波方法对比 | 卡尔曼滤波、一阶互补滤波、DMP姿态解算
MPU6050(DMP)简单读一下数据
STM32读取MPU6050角度数据