V
主页
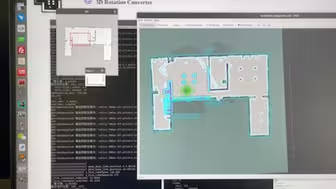
开源扫地机SLAM导航算法:FAR Planner全局路径规划
发布人
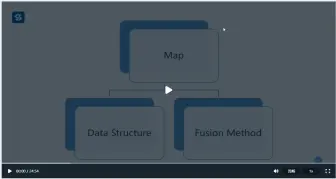
https://www.youtube.com/watch?v=5shnlyZ4L9M 来自卡内基梅隆大学工作,目前投稿ICRA2022!目前最普及的移动机器人应用仍是扫地机器人,让人惊艳的研究成果大多存在于难以复现的学术论文或严苛的实验条件中。一旦走出实验室,人工智能有时甚至变成了“人工智障”。FAR 是一种基于可见性图的路径规划算法,该方法能够有效地处理未知和部分已知的环境。 具体来说,该方法使用可见性图的两层实现,在每个数据帧的车辆附近构建局部层,并动态地将局部层合并到全局层中进行更新!
打开封面
下载高清视频
观看高清视频
视频下载器
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
花了8888买的path planning教程!收藏,速
ICRA最新开源!智能无人机探索未知洞穴及自主路径规划
导航路径规划算法
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
开源!做一个属于自己的智障扫地机器人
机器人全局路径规划算法—— FAR ( Fast, Attemptable Route Planner)
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
【运动规划算法】FAR Planner
机器人全局路径规划算法——FAR Planner (Dynamic Obstacle Handler Demo)
全覆盖路径规划——应用于扫地机器人(C++版本)
扫地机器人 ,SLAM 定位导航技术 的
基于Matlab扫地机器人路径规划问题-全覆盖内螺旋算法
【C++】2-手撕A*路径规划算法
扫地机弓形全覆盖算法
基于深度优先搜索算法的扫地机器人路径规划设计
扫地机器人路径规划
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
我做slam算法工程师已经一个月了|最大的感受就是轻松,简单,容易,好做,有手就行
move base中waypoint_global_planner的具体实现和代码讲解
FAR Planner —— IROS2022 最佳学生论文
ORBSLAM3纯视觉建图和导航
创客手工︱买了几千块的扫地机器人,现在很后悔
无需地图进行路径规划: 鲁棒快速的无人机自主飞行地图融合规划策略
扫地机器人是如何规划路线的?它都有哪些传感器?
自主移动机器人-建图-定位-导航
【附C++源代码】Hybrid A Star(混合A星)算法实现,考虑车辆运动学约束的路径规划算法
在实车上复现了CMU的在未知环境中引导车辆到达目标算法:far_planner
全覆盖路径规划-弓字回字路径原理、开源项目解读、技巧、跑机效果-扫地机商用清洁
毕设演示:基于ROS的激光SLAM导航。它甚至跑起来了
基于Matlab编写的扫地机器人路径规划
碰撞检测在路径规划和避障中的应用
FAR-Planner算法测试
Far-Planner适配实车并增加动态调参功能(开源)
江科大STM32结课设计,基于三块STM32F103C8TC6的扫地机器人(点赞过3000开源代码!出接线视频!!)
【预览】自动驾驶路径规划算法-大学生方程式FSAE-高速循迹-局部路径规划-开源
无恰饭真体验:如何花不到2K,实现80%旗舰级扫地机器人的功能?
演示 | 运动规划算法 | Lattice Planner: Obstacle Avoidance & Car Following
【高翔】视觉SLAM十四讲