V
主页
京东 11.11 红包
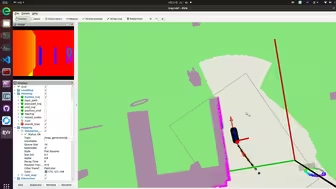
Far-Planner适配实车并增加动态调参功能(开源)
发布人
开源链接,https://github.com/meilaoliu/CMU-Navigation-with-rqt_reconfigure。 在CMU导航框架的基础上增加了rqt动态调参功能,同时将TwistStamped消息类型改为Twist消息类型,因为我所用的底盘的速度消息cmd_vel都是Twist类型的(大部分底盘也是),而源码中是TwistStamped类型的,比Twist多一个时间戳。 目前只适配了localPlanner、pathFollower、terrianAnalysis、farplanner中的参数,tareplanner由于由于有多个节点调用同一个参数的情况,rqt_reconfigure不是能很好适配,同时我发现tareplanner的鲁棒性太差,换一个环境要大改参数,参数过多,动态调参意义不大,欢迎有同样需求的小伙伴在使用、修改代码,在git上提交pr、issue。
打开封面
下载高清视频
观看高清视频
视频下载器
试一下CMU团队的导航框架
多机自主探索(剪映版)
多层长走廊场景下Fast-Lio2、Point-Lio、LIO-SAM、Faster-Lio建图对比视频
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
MID360雷达FAST-LIO2与LIO-SAM建图翻车视频
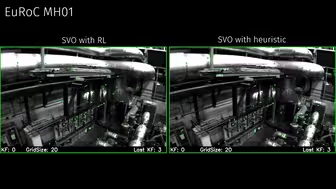
强化学习给视觉里程计自适应调参
基于ROS2的树莓派自主定位与导航小车
笑了,根本转不晕
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
当你在高铁上打开导航
UE4/5 Flying AI-Part 3 空中寻路飞行AI动态修改目标点 人工智能
2D Fast-Planner+MPC跟踪+Perception Aware
把玩 HybridAstar -- 双向搜索初步
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
DOM-60 为机器人带来前所未有的感知能力
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
听劝不要轻易入坑SLAM
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
动态环境中并行轨迹优化
2d slam-移动机器人自主全局重定位展示
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
花了一个学期打造的初代建图导航坤,结果竟然这样……(上上学期)
CMU推出神器!数学公式秒变可视化图表,太强了
苹果发布单摄SLAM算法 轻量化眼镜要来了?
Fast LIVO 硬同步过程释疑
定位语音包设置完成#导航骚气语音包 #高德地图怎么换导航声音 #导航成精
铰接式车辆的运动规划
14.异常点筛除机制
基于先验地图的通用激光雷达定位框架
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
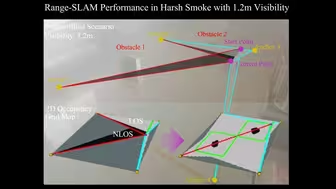
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localiza
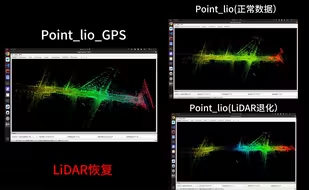
Point_lio_gps解决LiDAR退化导致的里程计漂移。
SLAM-Viewer,SLAM便捷可视化小工具
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
未知环境在线运动规划
高德地图,持续为您导航【车道级】
SLAM为什么需要IMU