V
主页
京东 11.11 红包
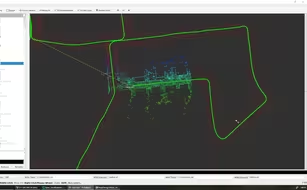
ICRA最新开源!智能无人机探索未知洞穴及自主路径规划
发布人
https://mp.weixin.qq.com/s/3V51YDOuiZSgtpGMx1Cz2Q 尽管微型飞行器的续航能力有限,但为了满足大规模探索具有挑战性和受限环境的综合需求,本文提出路径规划法使用运动基元来识别搜索空间的可行路径,同时最大化利用小型无人机的动态飞行特性。利用计算效率高的体素表达环境,规划器提供快速无碰撞和安全的路径,最大限度地提高预期勘探收益,并确保在未知环境中持续快速导航。该方法在内华达州北部废弃的地下矿井里进行实测,0.55米宽的无人机在0.8米宽的矿井内,能够以2米
打开封面
下载高清视频
观看高清视频
视频下载器
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
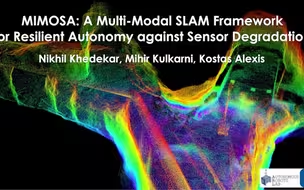
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
ETHZ开源|可与任何VIO前端兼容的SLAM通用后端!
基于ROS2的树莓派自主定位与导航小车
无人机应用于精细化农林业丨宾夕法尼亚大学的GRASP实验室项目
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
效率提高24%,突破功率受限!机器人的室内高效三维探索!宾夕法尼亚大学最新发布
IROS2022|腿式机器人+无人机强强联合,共同探索未知世界!苏黎世联邦理工研发
浙大&西交大等开源|使用贝叶斯核推理和优化的机器人自主探索!
苏黎世皇家理工等发布!带闭环稠密神经SLAM
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
一、SLAM多模态融合理论基础
【最新技术】ANYmal C 机器人自主探索地下矿井
MIT最新开源|野外环境下,机器人的风险感知运动规划!
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
装备反无人机激光武器系统的轮式装甲车亮相!
Air3S 地库自动泊"机" | DJI Air3S
聚焦海上异构智能无人系统及其在卫星信号拒止环境中的应用-北理工林德福教授@Pre-IROS
【IROS2022】港科大&大疆即将开源|短时间生成高质量三维稀疏拓扑骨架图,移动机器人的全局规划!
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
基于先验地图的通用激光雷达定位框架
NeRF又来了!可随意捕捉,支持用户以交互方式分割物体!
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
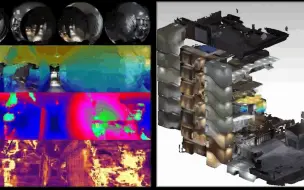
360度多层建筑定位和建图!
【开源】ICRA2022|CMU新工作,自主勘探开发环境与规划算法
挖掘机技术哪家强?ETHZ即将开源自主施工挖掘机!ICRA 2022
DOM-60 为机器人带来前所未有的感知能力
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
四旋翼微型无人机 模仿猛禽捕猎,快速精准抓取目标!
2021年度盘点:十大最佳开源SLAM算法!
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
无人机自动跟踪天线,相当于机载AAT,增强图传信号,扩展图传距离。
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!