V
主页
京东 11.11 红包
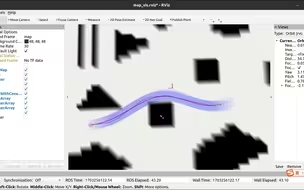
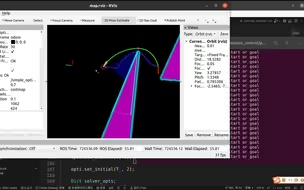
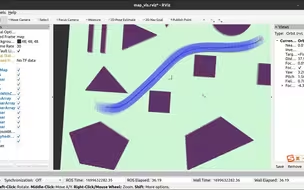
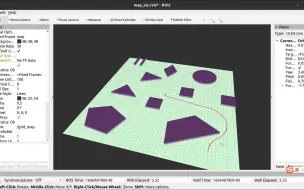
基于voronoi势场的碰撞项和平滑项对混合A星优化学习
发布人
学习了一下基于梯度的软约束的优化
打开封面
下载高清视频
观看高清视频
视频下载器
开源!!混合A星加LBFGS平滑
A*作为前端初始值的轨迹优化
用FAST LAB开源的LBFGS后端轨迹优化混合A星
安全走廊用于构建避障约束
开源!ROS C++实现的NMPC和LMPC轨迹跟踪
优雅的无人艇自主回收,还是混合A星加走廊加优化方案
不带后端优化的混合A*
安全走廊下的最小时间轨迹优化尝试
无人艇基于优化的自主回收轨迹生成
混合A*先导片,grid_map 和OMPL生成RS曲线
用ETH的Control toolbox实现一下nmpc
无前端路径作初始解的轨迹优化
ACADO生成NMPC代码,贼拉快!
uuv_simulator的介绍视频
mpc跟踪minimum jerk 轨迹
全向移动机器人NMPC跟踪fast planner局部轨迹
Apollo-HybridAstar 对 DL-IAPS算法的应用展示
mpc控制阿克曼类型的车
如何评价刘涛老师 太涩了
acados实现无人艇MPC简单避障
一个轻量级的无人艇局部规划器
最优控制入门,最小时间控制
OSQP-Eigen做参考线平滑
造轮腿机器人玩——轮毂电机控制
不能代表哈尔滨工程大学的无人艇自主回收,哈哈
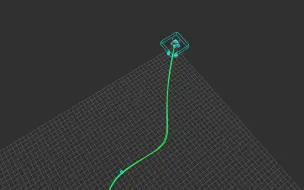
acados实现欠驱动无人艇nmpc轨迹跟踪
加松弛变量解决可能违反硬约束的情况
无人艇LQR轨迹跟踪
NMPC让无人艇“横着走”!
MPC-CBF静态避障
深度图识别圆心并获取深度
圆心像素坐标转世界坐标
圆环识别
无人艇符合海事规则的动态避障
峰哥给我的祝福
欠驱动无人艇漂移,纯属娱乐
很想用好TEB
GAI哥北京《进化论》演唱会精彩瞬间回顾
无人艇轨迹跟踪,线性mpc,这破玩楞太麻烦了
圆环中心检测