V
主页
京东 11.11 红包
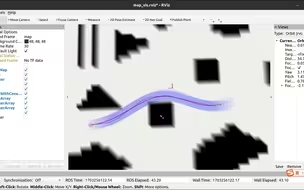
很想用好TEB
发布人
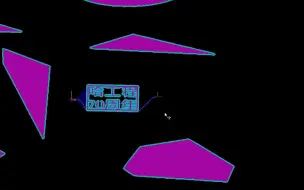
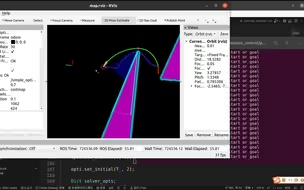
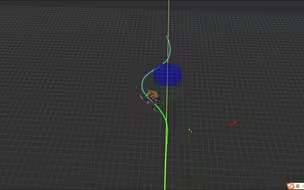
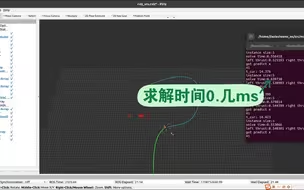
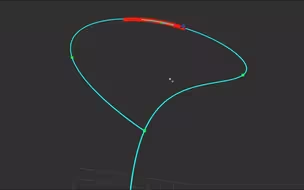
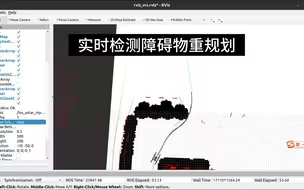
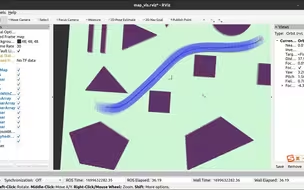
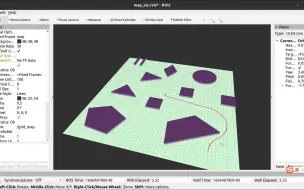
地图使用costmap2d,A星算法修改全局路径,Teb局部轨迹生成,MPC轨迹跟踪
打开封面
下载高清视频
观看高清视频
视频下载器
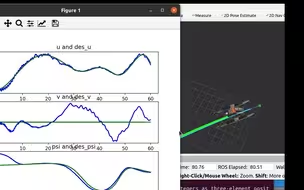
开源!ROS C++实现的NMPC和LMPC轨迹跟踪
ACADO生成NMPC代码,贼拉快!
开源!!混合A星加LBFGS平滑
teb用在无人艇的一个小尝试
costmap上从零实现A*
A星,混合A星,teb,mpc实现无人艇静态避障及简单自主航行
安全走廊用于构建避障约束
mpc避障?无人艇拉了
MPC-CBF静态避障
MPC初探——一个有“远见”的控制器
A*作为前端初始值的轨迹优化
水一期A*搜索
无人艇mpc动态避障小demo
用ETH的Control toolbox实现一下nmpc
基于voronoi势场的碰撞项和平滑项对混合A星优化学习
mpc跟踪minimum jerk 轨迹
无人艇LQR轨迹跟踪
安全走廊下的最小时间轨迹优化尝试
NMPC让无人艇“横着走”!
【316/钰哥】10000个妹子收藏计划第316期,一次一个妹子全套看个够
acados实现无人艇MPC简单避障
一个轻量级的无人艇局部规划器
全向移动机器人NMPC跟踪fast planner局部轨迹
改写python, 使用godot手撸Astar寻路算法
优雅的无人艇自主回收,还是混合A星加走廊加优化方案
全驱动无人艇NMPC轨迹跟踪
用FAST LAB开源的LBFGS后端轨迹优化混合A星
草草终结篇
混合A*先导片,grid_map 和OMPL生成RS曲线
最优控制入门,最小时间控制
欠驱动无人艇漂移,纯属娱乐
acados实现欠驱动无人艇nmpc轨迹跟踪
A星+DWA算法融合路径规划(动态+静态避障)
加松弛变量解决可能违反硬约束的情况
不带后端优化的混合A*
无前端路径作初始解的轨迹优化
无人艇基于优化的自主回收轨迹生成
mpc控制阿克曼类型的车
OSQP-Eigen做参考线平滑
无人艇符合海事规则的动态避障