V
主页
京东 11.11 红包
evio_testing2
发布人
For cooperaive inquiries, please visit the website:guanweipeng.com
打开封面
下载高清视频
观看高清视频
视频下载器
evio_testing3
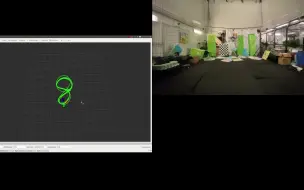
PL-EVIO Evaluation in HKU Campus Testing2
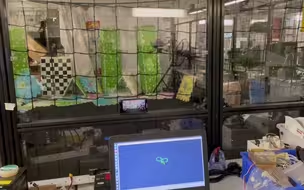
EVIO onboard flighting
基于ArUco Marker来估算camera的位姿
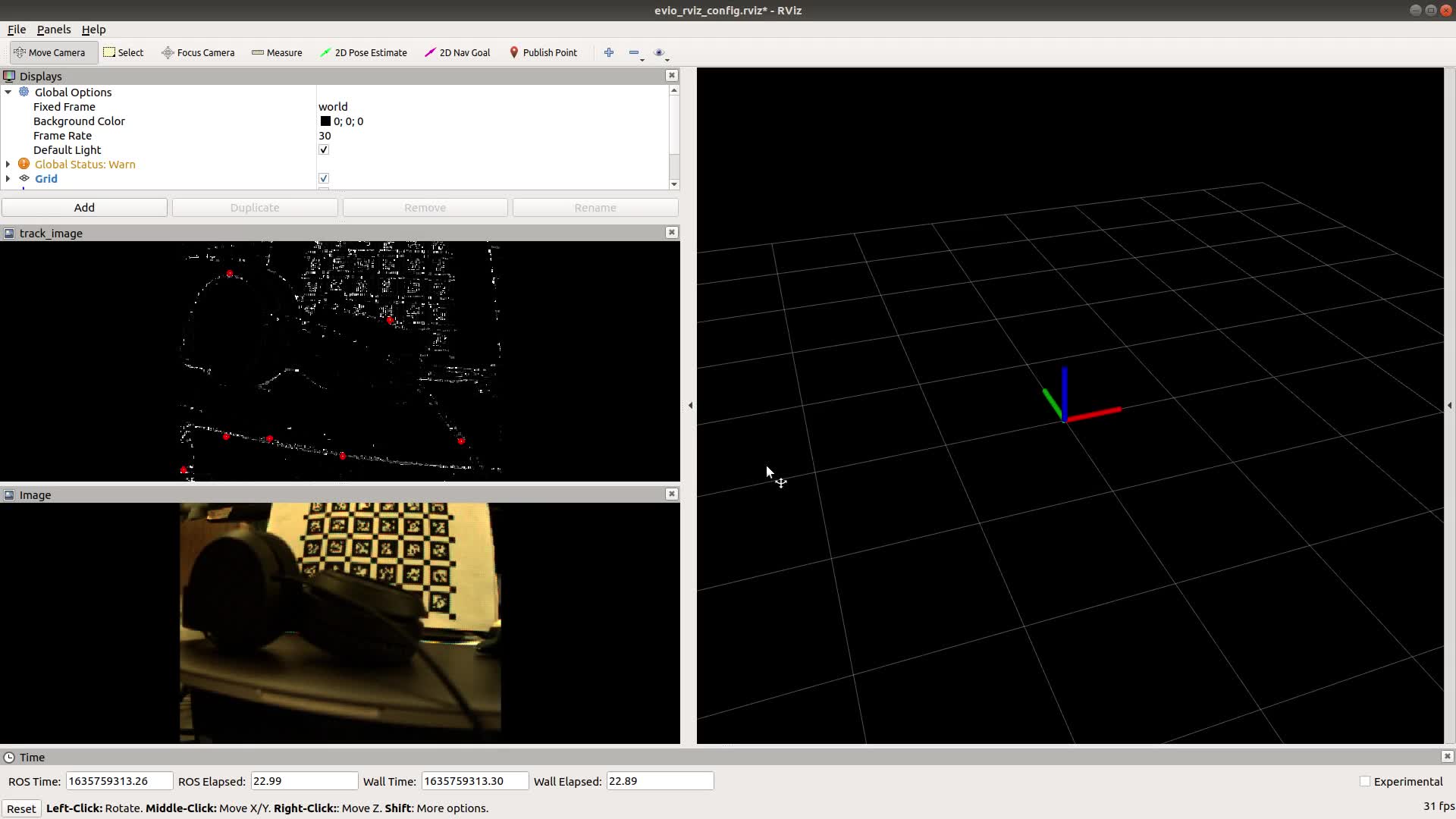
EVIO_arc_detection_frame_LK_timesurface_show
evio_testing1
EVIO onboard flighting
point_line_feature_vins_mono-testing2
d435i_msckf_vio
Evaluation of the Event-based VIO davis240c
Drone flight using PL-EVIO as pose estimator
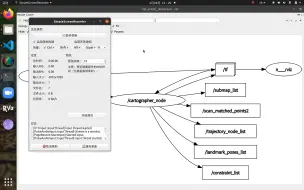
cartographer_mapping1
Multi-sensor fusion for VLP-SLAM localization and navigation
envio_testing2
esvo_core
kinectv2_rtabmap
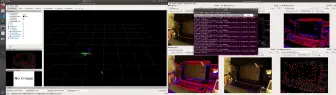
PL-EVIO: Event-based Visual Inertial Odometry with Point and Line Features
two_turtlebot2_LiDAR-SLAM_cartographer
flvis_l515
EVIO_for_time_surface_map_detection
cartographer_mapping2
PL-EVIO Evaluation in HKU Campus Testing1
(ccmslam)基于三个agents的单目SLAM地图融合
dvs_ARC*_feature_detection
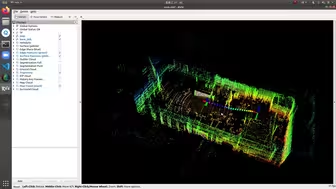
LIO-SLAM复现(3D LiDAR SLAM)
Demo:Multi-robot Cooperative Localization based on VLP and Odometer
PL-EVIO in poster_6dof.
lvi-sam_testing2
EVIO_for_standard_frame
cartographer_purlocalization_without_odom
cartographer_purlocalization_with_odom_usingmap
cartographer_purlocalization_without_odom_usingmap
(experiment) single turtlebot3 robot slam based on rrt_exploration package
基于rgbd camera的APF路径规划
LDSO_kitti_00
dvs_event_feature_detection
swarm-ego-planner复现(基于多无人机)
PL-EVIO_hku_agg_hand_flip
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
MSCKF-VIO