V
主页
京东 11.11 红包
envio_testing2
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
A Compact LiDAR Odometry and Mapping with Dynamic Removal
d435i_msckf_vio
envio_testing3
GPS丢失情况下无人机定位-VIO+VPS
NeRF-VINS:A Real-time Neural Radiance Field Map-based Visual-InertialNavigation
evio_testing2
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
SLAM为什么需要IMU
DPVO testing 0493
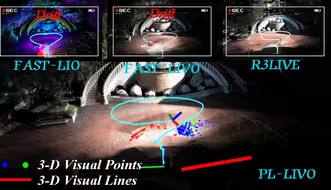
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
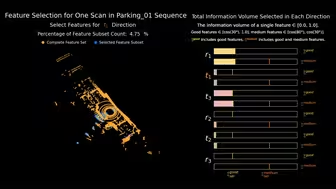
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
Gaussian Splatting SLAM
DROID-SLAM:Deep Visual SLAM for Monocular, Stereo and RGB-D Cameras
Gaussian Splatting SLAM Testing using euroc mh02
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
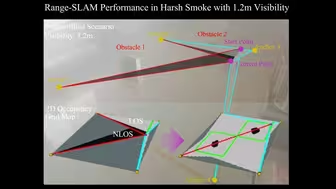
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localiza
Robust Dynamic Radiance Fields
LiDAR-NeRF:Novel LiDAR View Synthesis via Neural Radiance Fields
cartographer_3D_LiDAR_SLAM——WithLandmarks
Gaussian-SLAM Photo-realistic Dense SLAM with Gaussian Splatting
ICRA 2024 Presentation (PL-EVIO)
ImMesh Testing using hku_campus_seq_02
苹果发布单摄SLAM算法 轻量化眼镜要来了?
envio_testing using hku_hdr_agg
视觉惯导融合SLAM内外参标定是关键
(激光雷达实时三维重建)ImMesh Testing using hku_main_building
GS-LIVOM (Environment Guideline)
基于nsh_indoor_outdoor数据集的A-LOAM复现(3D LiDAR SLAM)
kinectv2_rtabmap
envio_testing using HKU_aggressive_rotation
cartographer_mapping1
cartographer_mapping_with_odom
DPVO testing 0482
基于intel realsense l515激光相机的rtabmap
LIO-SAM_kitti_00
DPVO testing 0497
NeRF:Representing Scenes as Neural Radiance Fields for View Synthesis