V
主页
京东 11.11 红包
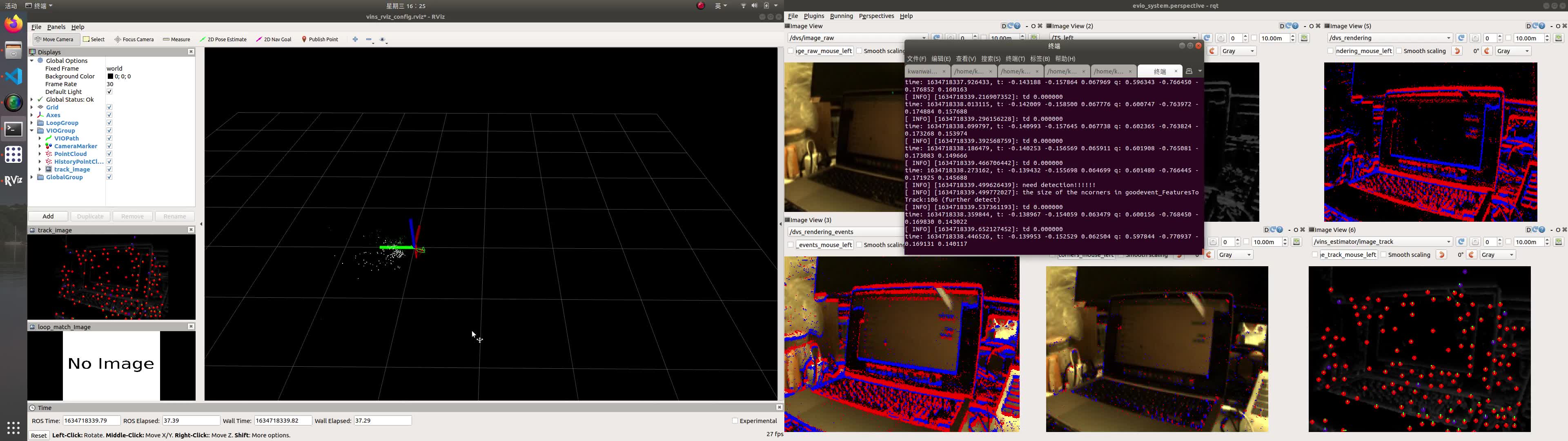
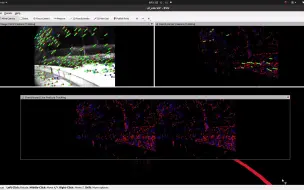
EVIO_arc_detection_frame_LK_timesurface_show
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Gaussian-SLAM Photo-realistic Dense SLAM with Gaussian Splatting
Three Kinds of Feature Detection and Tracking in Our PL-EVIO (1)
dvs_ARC*_select__feature_detection
LVI_SLAM复现(3D LiDAR SLAM)
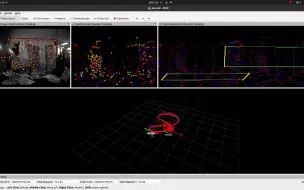
Three Kinds of Feature Detection and Tracking in Our PL-EVIO
dvs_render_feature_detection
dvs_event_feature_detection
dvs_velodyne_gazebo_simulation
rtabmap_kinect2_realtest2
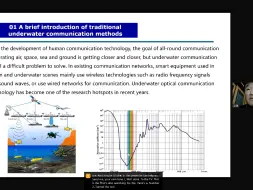
Optical Camera Communications for IOT
ICRA 2024 Presentation (PL-EVIO)
EVIO onboard flighting
LIO-SLAM复现(3D LiDAR SLAM)
PL-EVIO Evaluation in HKU Campus Testing2
evio_testing2
PL-EVIO Evaluation in HKU Campus Testing1
PL-EVIO flighting testing (1)
基于QGC的PX4在线仿真
调车总不能炸机了吧(●'◡'●)
用于水下移动机器人的蓝绿LEDLD光通信设备测试
Our PL-EVIO Evaluation in UZH-FPV Dataset
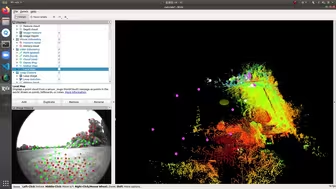
Gaussian Splatting SLAM
PL-EVIO in dynamic_6dof
(ccmslam)基于三个agents的单目SLAM地图融合
event-corner-fature+timesurface-line-feature
PL-EVIO flight testing2
Simulation for ORB-SLAM
RGBD GS-ICP SLAM渲染结果
raw_image_feature_detection
evio_testing1
Drone flight using PL-EVIO as pose estimator
DPVO testing 0482
Tightly-coupled SLAM for the VLP Landmark, Wheel Odometer and RGB-D camera
evio_testing3
Evaluation of the Event-based VIO davis240c
基于ArUco Marker来估算camera的位姿
ICRA 2024-05-14, Online, PL-EVIO
esvo_time_surface
EVIO_for_standard_frame
基于ros路径规划+避障演示