V
主页
全程干货!每一行代码都讲了,就差帮你做了。【六足机器人全拆解P4】
发布人
webots 工程:https://github.com/XuelongSun/HexapodWebots URDF教程:http://wiki.ros.org/urdf IKPY github:https://github.com/Phylliade/ikpy IKPY project:https://pypi.org/project/ikpy/
打开封面
下载高清视频
观看高清视频
视频下载器
一个视频理解六足控制和python模拟器【六足机器人全拆解P3】
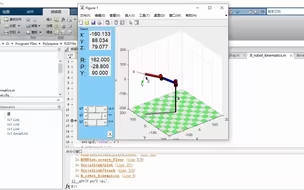
Matlab六足机器人步态仿真
六足机器人DIY,400元低成本复刻,
六足攀爬机械Hexapod不朽者
一定要看完,一个视频搞懂正反向运动学,不香嘛?!【六足机器人全拆解P2】
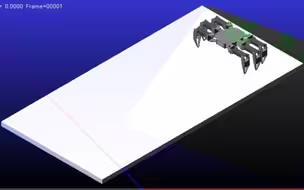
六足机器人仿真研究
【Webots入门教程-4运行第一个仿真】循迹,避障,闪烁LED-机器人控制器实现
手把手带你做开源六足机器人(3D图纸+硬件图纸+软件源码+制作说明书在视频下方自取!)
【开源啦!】无刷轮腿平衡机器人
2.10step函数详解(六足机器人)
手把手带你做开源ROS六足机器人——组装调试(300块钱+2个小时)
【Webots入门教程-2构建第一个世界】使用Webots构建一个办公室
六足机器人 蛛形机器人 adams仿真
六足机器人前进、横移与原地转弯
小型六足机器人入门视频教程
Why 六足?你能获得什么?【六足机器人全拆解P1】
【干货】足式机器人步态编程基础介绍(附蜘蛛机器人运动学逆解、开源六足机器人仿真器演示)
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试
【Webots入门教程-3打造第一个机器人】使用Webots做一个两轮驱动机器人
开源六足机器人树莓派Python代码开发进展——用Python写一个步态动画展示程序!
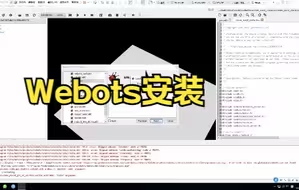
02-1 Webots安装
国内外优秀开源机器人项目整理篇【六足机器人 Hexapod】
从头开始建造了一个Arduino动力六足机器人
相机模型都没弄懂,怎么搞机器人视觉算法?
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
超帅气六足机器人开源啦!(下载链接在评论区)
【六足更新】开源树莓派Python编程六足机器人功能介绍和运动测试(代码开源啦!)
六足机器人左右转步态
六足机器人的三种步态参考
[第十届机创]可跳跃的六足仿生机器人_建模全过程
六足机器人三角步态前进
【全程干货】基于Webots仿真软件的机器人仿真设计(二)
手把手教(不是“叫”)你制作一个代码开源、使用树莓派和Python驱动的六足机器人【预告】
【毕设开源3】matlab四足机器人步态仿真与代码讲解
六足机器人simulink仿真
【四六足机器人】六足机器人PiHexa使用新舵机测试 & 四足机器人开源预告(蜘蛛构型,ESP32主控,C++/MicroPython编程,3D打印)
六足机器人Adams动力学仿真
【自制蜘蛛机器人】开始DIY你的第一个3D打印四足机器人吧!Pyhon代码结构、舵机较准流程及控制界面给你介绍了(ESP32主控)
六足机甲 - 当年完工后的一些测试视频存档(2017)
手把手带你做开源ROS六足机器人——RVIZ步态解算