V
主页
京东 11.11 红包
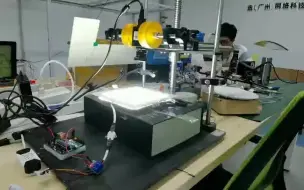
Optical Camera Communications for IOT
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
Optical Camera Communication (OCC) based on C-OOK
基于ArUco Marker来估算camera的位姿
(with lens for further distance)Optical Camera Communication (OCC) based on C-OO
基于stereo camera的视觉里程计的实现
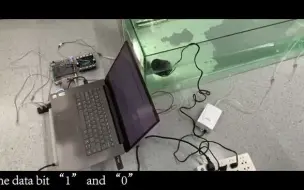
Underwater Optical Camera Communication with Bubble Degradation
可见光通信在IOT上的应用
four event camera synchronization
Gaussian Splatting SLAM
event_camera_visual_odometry_second_test
基于蓝牙及可见光通信融合的光二维码
VLC在6G中的应用前景
基于stm32的具有可见光通信功能的LED阵列
LIO-SAM_kitti_00
基于可见光通信的移动机器人室内定位
基于ArUco Marker来估算camera的位姿(with RMS)
esvo_core
SplaTAM Testing using TUM-Dataset freiburg1_xyz_seed0(最终结果可视化,这个UI不是一般的难用)
Robust Dynamic Radiance Fields
亿点搞笑#463
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)
单机器人自主探索建图
FAST-LIVO测试之——hku2
SplaTAM Testing using TUM-Dataset freiburg1_desk_seed0(训练过程可视化)
倾斜状态下的可见光定位演示
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
Mono-VINS-DenseMapping (单目VIO+单目稠密重建) 分辨率346*260
dvs_from_M2DGR
evio_testing3
DPVO testing 0493
DBA-Fusion Testing 可视化点云
基于Kinect的3D重(最终建图效果)
FAST-LIVO测试之——hku1
event_camera_visual_odometry
事件相机数据slider_depth可视化
基于COLMAP测试3D Gaussian Splatting(训练过程可视化)
(ccmslam)基于三个agents的单目SLAM地图融合
基于可见通信的机器人与行人同时定位导航系统
SplaTAM Testing using TUM-Dataset freiburg1_desk2_seed0(训练过程可视化)
基于扩展卡尔曼滤波的Visual-marker与IMU融合定位
基于可见光通信的智能广告灯