V
主页
京东 11.11 红包
LIO-SAM_kitti_00
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
aloam_kitti_00
Gaussian Splatting SLAM Testing using euroc mh02
self-developed LVI-Mapping testing hku_campus_seq_00
LIO-SLAM复现(3D LiDAR SLAM)
lio-sam_testing1
PV-LIO (VoxelMap) testing using
Multi-sensor fusion for VLP-SLAM localization and navigation
DPVO testing 0497
LVI_SLAM复现(3D LiDAR SLAM)
LDSO_kitti_00
flvis_kitti_00
PV-LIO (VoxelMap) testing using hku_campus_seq_00
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
FAST-LIVO测试之—LiDAR_Degenerate
SplaTAM Testing using TUM-Dataset freiburg1_desk_seed0(训练过程可视化)
PV-LIO (VoxelMap) testing using outdoor_Mainbuilding_10hz_2020-12-24-16-38-00
(ccmslam)基于三个agents的单目SLAM地图融合
Robust Dynamic Radiance Fields
vins_mono_l515
ImMesh Testing using hku_campus_seq_00
lvi-sam_testing2
MSCKF-VIO
基于HKUST数据集的LOAM_livox复现V2(3D LiDAR SLAM)
ICRA 2024 Presentation (PL-EVIO)
GO-SLAM:Global Optimization for Consistent 3D Instant Reconstruction
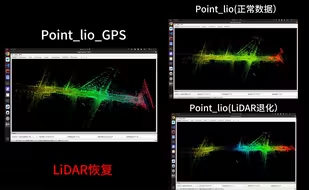
Point_lio_gps解决LiDAR退化导致的里程计漂移。
svo_ stereo_frontend_imu
VoxelMap++ testing
RGBD GS-ICP SLAM渲染结果
SplaTAM Testing using TUM-Dataset freiburg1_xyz_seed0(最终结果可视化,这个UI不是一般的难用)
LVI-SAM_testing-2023-07-18_17.21.41
fastlio_testing3
envio_testing3
Gaussian Splatting SLAM Testing using Replica
lvisam_testing4
ImMesh testing using kitti_07
pointlio_testing3
cartographer_mapping1
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg1_desk
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)