V
主页
京东 11.11 红包
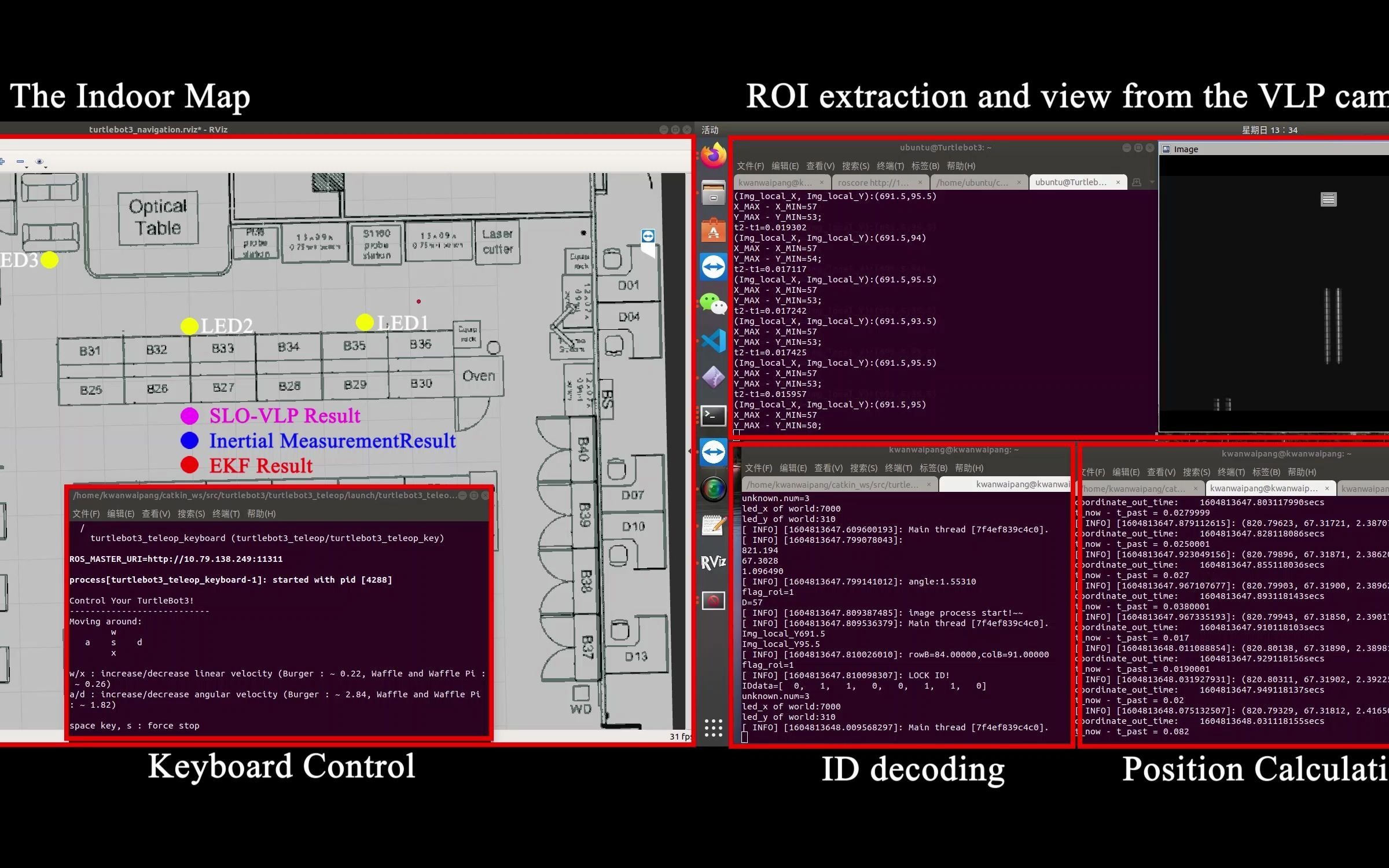
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Multi-sensor fusion for VLP-SLAM localization and navigation
High Accuracy, 6-DoF Simultaneous Localization and Calibration using VLP
Demo:Multi-robot Cooperative Localization based on VLP and Odometer
基于可见光通信的移动机器人室内定位与导航 (Robot Indoor Localization using Visible Light Positioning)
Multi-robot Cooperative Localization using Visible Light Positioning
Demo : Single LED Positioning Scheme Based on Angle Sensors in Robotics
Robust Visible Light Positioning with Low Complexity
Robot Localization and Navigation based on Visible Light Positioning
Robotic Localization System based on Multi-Sensor Fusion for VLP and SLAM
可见光通信在IOT上的应用
基于扩展卡尔曼滤波的Visual-marker与IMU融合定位
Multi-Mobile Robot Localization and Navigation based on Visible Light Positionin
Visible Light Positioning based on Mobile Robot using Android Control
High Accuracy Robot Indoor Navigation using Visible Light Positioning and LiDAR
基于Augmented State EKF来实现多传感器的融合(IMU,PNP,VO)
Robust Dynamic Radiance Fields
SLAM为什么需要IMU
OCC Testing using the Light from Infineon
High Accuracy Robot Localization using Single LED VLP with Odometer
PL-EVIO: Event-based Visual Inertial Odometry with Point and Line Features
Single LED Visible Light Positioning with Odometer
倾斜状态下的可见光定位演示
The Demo of SLO-VLP
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)
Pose initialization for VLP-SLAM
Robot Localization & Navigation using Visible Light Positioning and SLAM Fusion
多传感器融合SLAM松耦合与紧耦合
Real-time and efficient LED-ID decoding in robotics localiaztion
SplaTAM Testing using TUM-Dataset freiburg1_xyz_seed0(训练过程可视化)
DBA-Fusion Testing 可视化点云
SplaTAM Testing using TUM-Dataset freiburg3_long_office_household__seed0(训练过程可视化
基于可见光通信的移动机器人室内定位
Gaussian Splatting SLAM Testing using Replica
Robot Localization & Navigation using Visible Light Positioning and SLAM Fusion2
VLC在6G中的应用前景
基于 Kinec的3D重建
通过LiFi 进入6G 时代
VLP Provides Pose Initialization and Correction for LiDAR-SLAM
基于ArUco Marker来估算camera的位姿
Real-time Pose Estimation of Multi-sensor Fusion for VLP-SLAM based on EKF