V
主页
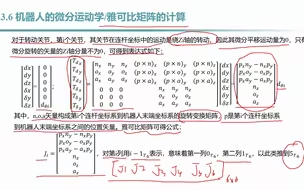
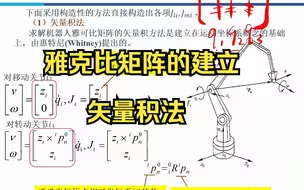
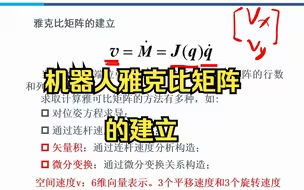
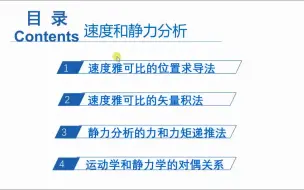
机器人学 l 3.6 速度雅可比矩阵的矢量积法
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
机器人学 2.6 雅可比矩阵总述
【自制中英】雅可比矩阵:真正理解导数和积分的本质 Part.1
3.10 雅可比矩阵的计算
4-1机器人速度雅可比矩阵
雅可比矩阵与坐标变换浅谈
机器人学 2.15 矢量积法求解SCARA机械臂的雅可比矩阵
4-6雅克比矩阵的建立-矢量积法
机器人学 2.8 用矢量积法构建雅可比矩阵 J
4-5机器人雅克比矩阵的建立
机器人学 l 3.5 速度雅可比矩阵的位置求导法
机器人学 2.14 矢量积法求解2R机械臂的雅可比矩阵
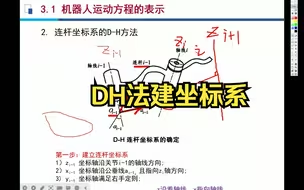
3-3DH法建坐标系
机器人学 2.9 用末端的线速度和角速度构建雅可比矩阵
机器人学 2.17 末端速度递推式求解2R机械臂的速度雅可比矩阵(MDH)
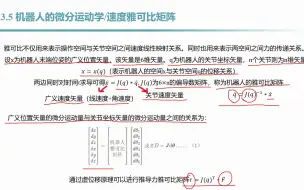
3.6 机器人微分运动学之雅可比矩阵(1)
空间机器人技术-建模与控制基础:18.角速度的雅克比矩阵
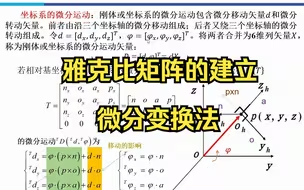
机器人学 2.7 微分变换法构建雅可比矩阵 TJ
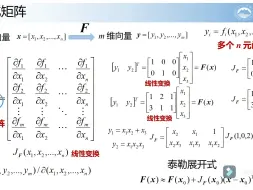
03-19-多元函数-雅可比矩阵
4-2机器人速度雅克比矩阵与速度分析
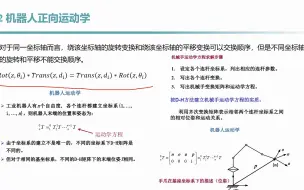
3.2 机器人DH参数表达法
机器人学 l 7.3.3 笛卡尔空间中的轨迹规划
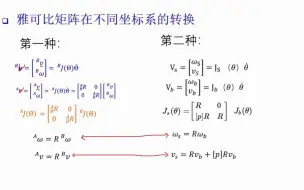
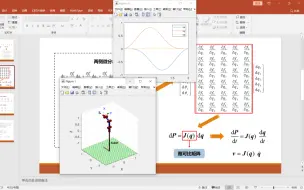
两种方法的雅可比矩阵的不同讨论1-速度的定义
【公开课】“操作臂的雅可比矩阵”下+“操作臂动力学”上 | 华中科技大学:机器人学 10
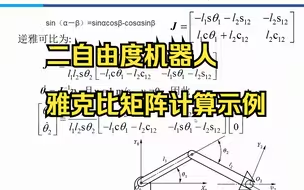
4-3二自由度机器人雅克比矩阵计算示例
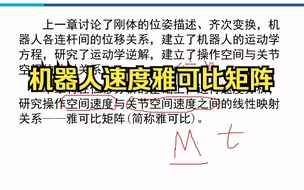
3.7 机器人微分运动学之速度雅可比矩阵(2)
机器人DH法、运动学、雅克比(Jacobian)矩阵
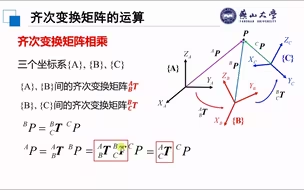
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
机器人中的雅可比矩阵,概念很简单,建议大家直接用现成的公式
引入雅可比矩阵:曲线变换的伸缩系数,重积分换元定理
4-7雅克比矩阵的建立-微分变换法
机器人学 2.7 雅可比矩阵的微分变换法总述
速知系列——jacobi矩阵到底是个啥?
4-9雅可比矩阵的Matlab机器人工具箱仿真
机器人运动控制简明教程 第三节 雅可比矩阵
4-4机器人雅克比矩阵的奇异性
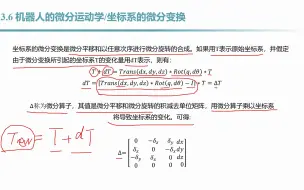
3.9 坐标系的微分运动与机器人手的微分运动
【教学-机器人工具箱】机械臂雅可比矩阵 Jacobian Matrix
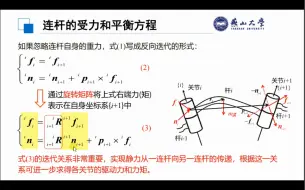
机器人学 l 3.7 连杆的受力与平衡方程
4-8雅克比矩阵的建立-微分变换法示例
机器人 运动学 D-H经典方法和改进D-H方法参数表建立