V
主页
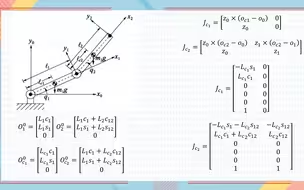
4-3二自由度机器人雅克比矩阵计算示例
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人DH法、运动学、雅克比(Jacobian)矩阵
二连杆机械臂动力学(使用雅克比Jacobian矩阵)
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
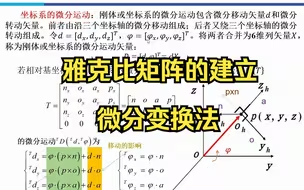
4-8雅克比矩阵的建立-微分变换法示例
第四章 雅克比矩阵元素的推导
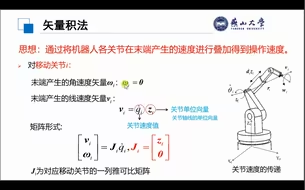
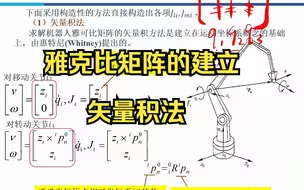
机器人学 l 3.6 速度雅可比矩阵的矢量积法
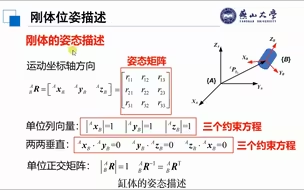
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
机器人学 l 3.5 速度雅可比矩阵的位置求导法
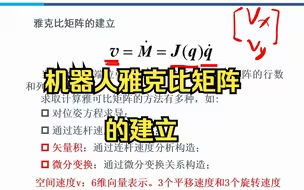
4-5机器人雅克比矩阵的建立
6-1路径描述及轨迹生成
4-1机器人速度雅可比矩阵
3-13Matlab机器人工具箱的使用和DH建模方法回顾
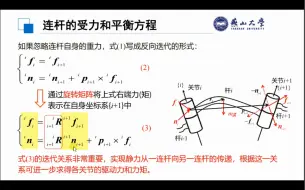
机器人学 l 3.7 连杆的受力与平衡方程
雅克比行列式概念终于懂啦
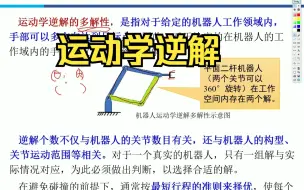
3-12运动学逆解示例:PUMA560
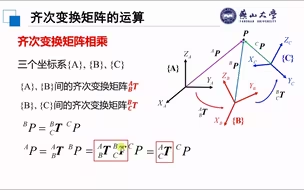
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
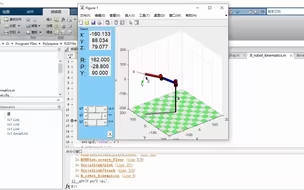
4-9雅可比矩阵的Matlab机器人工具箱仿真
数值分析24-线性方程组迭代法:雅克比迭代法(例题)
6-3关节空间的轨迹规划
4-7雅克比矩阵的建立-微分变换法
3-11运动学逆解
4-6雅克比矩阵的建立-矢量积法
7-1机器人控制系统的特点及控制方式
3-7DH4个参数的练习
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
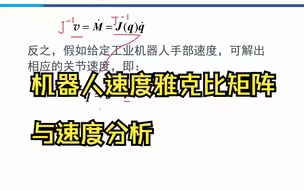
4-2机器人速度雅克比矩阵与速度分析
机器人动力学拉格朗日法详细推导(二连杆机械臂)
机器人运动控制简明教程 第三节 雅可比矩阵
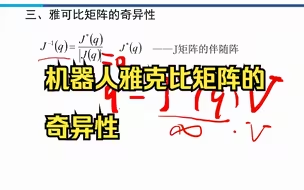
4-4机器人雅克比矩阵的奇异性
4-12刚体的转动惯量
《动手学机器人学》(3)-齐次坐标与变换矩阵
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
4-15动力学分析方法-拉格朗日方法
机器人中的雅可比矩阵,概念很简单,建议大家直接用现成的公式
机器人技术基础(1)
3-4DH4个参数AlphaA
求逆矩阵的三种方法
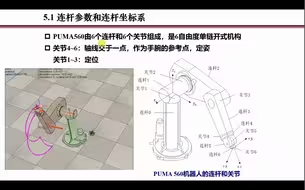
3-2DH法坐标系编号
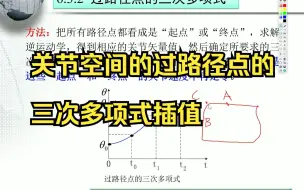
6-5关节空间的过路径点的三次多项式插值
2-00软件定义