V
主页
京东 11.11 红包
Deploying Autonomous Service Mobile Robots, And Keeping Them Autonomous
发布人
Maryland Robotics Center Maryland Robotics Center Seminar: Deploying Autonomous Service Mobile Robots, And Keeping Them Autonomous Joydeep Biswas Assistant Professor Department of Computer Science The University of Texas at Austin Why is it so hard to deploy autonomous service mobile robots in unstructured human environments, and to keep them autonomous? In this talk, I will explain three key challenges, and our recent research in overcoming them: 1) ensuring robustness to environmental changes; 2) anticipating and overcoming failures; and 3) efficiently adapting to user needs. To remain robust to environmental changes, we build probabilistic perception models to explicitly reason about object permanence and distributions of semantically meaningful movable objects. By anticipating and accounting for changes in the environment, we are able to robustly deploy robots in challenging frequently changing environments. To anticipate and overcome failures, we introduce introspective perception to learn to predict and overcome perception errors. Introspective perception allows a robot to autonomously learn to identify causes of perception failure, how to avoid them, and how to learn context-aware noise models to overcome such failures. To adapt and correct behaviors of robots based on user preferences, or to handle unforeseen circumstances, we leverage representation learning and program synthesis. We introduce visual representation learning for preference-aware planning to identify and reason about novel terrain types from unlabelled human demonstrations. We further introduce physics-informed program synthesis to synthesize and repair programmatic action selection policies (ASPs) in a human-interpretable domain-specific language with several orders of magnitude fewer demonstrations than necessary for neural network ASPs of comparable performance.
打开封面
下载高清视频
观看高清视频
视频下载器
Russ Tedrake : Motion Planning Around Obstacles with Graphs of Convex Sets
人型机器人走的好稳-人間のような歩き方をするロボットⅡ(Biped robot walks just like a human being Ⅱ.)
Walk the Walk_ HyundaiMotor X BTS for 'BTS Yet To Come in BUSAN' concert
【潜兵动画】我嘞个绝地阿斯塔特啊——传奇潜兵布拉施将军
3.85万人民币
Powered Suit CODE NAME KOMA 1.5
Feasibility Study of LIMMS (UR2022)
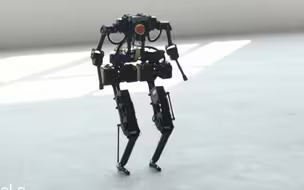
BRUCE--Bipedal Robot Unit with Compliance Enhanced
The Future of Harvesting- Fruit-Picking Flying Autonomous Robots™ by Tevel - HMC
#Visit to #Shadow #Robot London HQ
“Magnetic Surgical Robots: A “Fantastic Voyage” deep inside the human body
ADAM Drink Robot Mobile Solution - Service Outdoors
MIT Robotics - Russ Tedrake - Planning with Graphs of Convex Sets (in the age of
跳跃机器人 Salto-1P Leaping and Landing
A Fractal Suction-based Robotic Gripper for Versatile Grasping
[KIMLAB x PSYONIC] Turned to the Dark Side (Star Wars General Grievous theme)
Mobile walking #excavator Arter and the #rover Sherpa work together on a barrel
双足行走的强化学习算法介绍与部署
Arash Ajoudani - Shared authority control of a MObile Collaborative robot Assist
只要2万美元!马斯克确认特斯拉机器人2.0 Optimus Gen 3可以完成的所有任务!
Lab Tour - Halloween 2022
ICRA 2022 - R5 Robot Ready
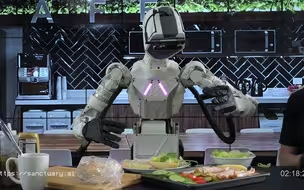
Robots Doing Stuff #3 - The Turkey Sandwich Paradox
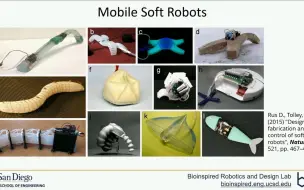
Biologically Inspired Soft Mobile Robots, September 16, 2022_ Michael T. Tolley
Spring 2024 GRASP Robot Learning by Understanding Egocentric Videos
【helldivers2】机炮+爆燃弩纯硬刚单通难10机器人
Justin Yim, University of Illinois, -Small Robots Traversing the World at Large
Stanford Seminar - Representation Learning for Autonomous Robots
MIT Robotics - Rebecca Kramer-Bottiglio - Shape-shifting soft robots
ICRA2024- Supernumerary Robotic Limbs to Support Post-Fall Recoveries for Astron
From the archives- IHMC Atlas Clearing Debris with Teleoperation
Billiard-Like Robots Let Them Be Unstable and Unobservable
Fall 2023 GRASP SFI - Autonomy for insect-scale robots
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
A Climbing Robot with Long Extending and Bending Tape Measure Limb - EEWOC
Soft Talk - Electroionic Artificial Muscles for Biomedical Soft Robots - Manmath
AI-Powered Robotic Bees - A Journey Into The Mind And Body
The World's Simplest Omnidirectional Mobile Robot _ 世界一シンプルな全方向移動ロボット
Robots Doing Stuff #28 - Rock, Paper, Scissors
【Python】人形机器人——全身控制