V
主页
【T-ITS】Safety-guaranteed Trajectory Planning with Embodied Footprints(具身足迹模型)
发布人
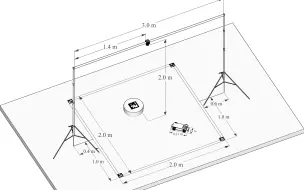
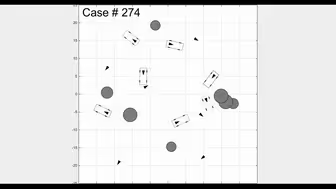
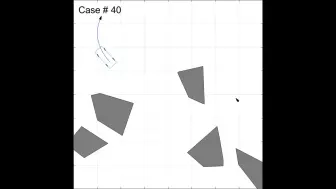
Simulation and field test results of a recently accepted manuscript T-ITS-23-02-0320.R2 entitled "Embodied Footprints: A Safety-guaranteed Collision-avoidance Model for Numerical Optimization-based Trajectory Planning". This paper has been accepted in T-ITS on Setp. 13, 2023. The abstract is given as follows. Optimization-based methods are commonly applied in autonomous driving trajectory planners, which transform the continuous-time trajectory planning problem into a finite nonlinear program with constraints imposed at finite collocation points. However, potential violations between adjacent collocation points can occur. To address this issue thoroughly, we propose a safety-guaranteed collision-avoidance model to mitigate collision risks within optimization-based trajectory planners. This model introduces an “embodied footprint”, an enlarged representation of the vehicle’s nominal footprint. If the embodied footprints do not collide with obstacles at finite collocation points, then the ego vehicle’s nominal footprint is guaranteed to be collision-free at any of the infinite moments between adjacent collocation points. According to our theoretical analysis, we define the geometric size of an embodied footprint as a simple function of vehicle velocity and curvature. Particularly, we propose a trajectory optimizer with the embodied footprints that can theoretically set an appropriate number of collocation points prior to the optimization process. We conduct this research to enhance the foundation of optimization-based planners in robotics. Comparative simulations and field tests validate the completeness, solution speed, and solution quality of our proposal. Title: Embodied Footprints: A Safety-guaranteed Collision-avoidance Model for Numerical Optimization-based Trajectory Planning Authors: Li, Bai; Zhang, Youmin ; Zhang, Tantan; Acarman, Tankut; Ouyang, Yakun; Li, Li; Dong, Hairong; Cao, Dongpu 此研究是2021年中秋节开展的,历时2年时间最终发表了出来
打开封面
下载高清视频
观看高清视频
视频下载器
湖南大学李柏教授自动驾驶决策规划课题组近年研究成果(2015-2021)
湖南大学李柏教授自动驾驶决策规划课题组2022-2023年度研究成果总结
【T-ITS】Fast Trajectory Optimization for Autonomous Parking with Static Obstacles
【T-IV】Online Parking Trajectory Replanning for Sudden Environmental Changes
【T-ITS】Trajectory Planning for Autonomous Driving on Curvy Roads
IEEE ITSC 2022 Trajectory Planning Competition for Automated Parking
【T-IV】Tractor-Trailer Vehicle Trajectory Planning in Narrow Environments
【CCDC 2021】Fast Trajectory Planning for AGV in the Presence of Moving Obstacles
【IFAC 2020】 On-road Trajectory Planning in the Cartesian Frame
【ICPS 2021】Cooperative Maneuver Planning and Replanning for Multiple TTVs
【RA-L】Tractor-trailer Vehicle Maneuver Planning in a Curvy Tunnel
【ECC 2020】Maneuver Planning for Automatic Parking with Safe Travel Corridors
【RA-L】Optimal Cooperative Maneuver Planning for Multiple Nonholonomic Robots
【T-IV】Mixed-integer and Conditional Trajectory Planning for a Mining Truck
【Electronics】Occlusion-aware Path Planning to Promote Positioning Accuracy
【T-IV】Adaptive Pure Pursuit (APP) Path Planner
【Python】柔顺控制——导纳控制
非结构化场景中智能车集群实时集中式协同轨迹规划
《智能网联汽车协同决策与规划》第五章仿真实验结果
复杂约束下自动驾驶车辆运动规划的计算最优控制方法研究(仿真配套视频)
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
【Python】模仿学习——动态运动基元
Universal Trajectory Optimization Framework for Differential Drive Robot Class
INSGA算法+六自由度机械臂七次B样条曲线轨迹规划
《智能网联汽车协同决策与规划》第二章仿真实验结果
【T-SMC】无信号灯无车道自由路口场景中的协同轨迹规划
【Python】模仿学习——高斯混合模型
《智能网联汽车协同决策与规划》第四章仿真实验结果
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
【ICRA 2021】Lane-free Autonomous Intersection Management
《智能网联汽车协同决策与规划技术》李柏 葛雨明 著(机械工业出版社2020)
EM Planner is all u need?
自动驾驶车辆园区测试
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
【ICRA 2022】复杂非结构化场景中多车协同轨迹规划方法
《智能网联汽车协同决策与规划》第三章仿真实验结果
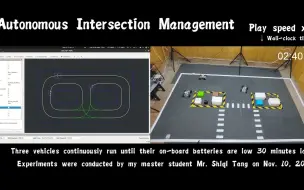
【IFAC 2020】 Autonomous Intersection Management via Computational Optimal Control
仿生机器人女友它水灵灵的来了
多叉车协同速度规划
机器人悬挂设计