V
主页
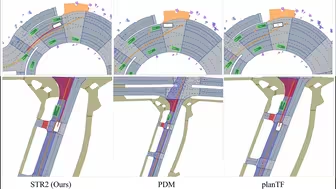
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
发布人
我们开源了rda-ros的代码, 地址:https://github.com/hanruihua/rda_ros 代码提供了RDA planner 的ROS接口,并且提供了在自动驾驶 (Carla)和动态避障 (Gazebo limo) 方面的应用展示。欢迎试用 和 star 支持!
打开封面
下载高清视频
观看高清视频
视频下载器
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
基于强化学习和速度障碍法的多机器人导航
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
使用Isaac Sim和ROS2实现大田农业机器人
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
省赛综测学分、奖学金、学ROS,统统拿下
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
NeuPAN: 通过基于模型的学习实现直接基于点的端到端机器人导航
今天把我做的这个机械臂开源
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
【开源无人机】三维激光下的ego避障
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
MoveIt与Isaac Sim结合使用
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
NVIDIA Isaac ROS 3.0:重塑机器人未来
端到端机械臂视觉抓取无人配送的场景演示
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
网友搞出世界最小开源端到端人形机器人,极简DIY成本仅2500
使用Isaac Sim和ROS2控制机器狗指南
【开源无人机】ROS系统中yolo模型处理多摄像头
我家的机器狗会飞哦
机器人移动底盘
【开源无人车】从零调试一辆PIX无人车
基于Gazebo的无人车激光SLAM建图与导航仿真
自己组装一台巡检机器人需要多少银两?
机器人移动底盘遥控测试
【开源无人车】从零组装一辆开源PIX无人车
Isaac Sim和ROS2自主移动机器人(bcr_bot)
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
Neural MP - 跨任务运动规划的通用机器人控制策略
3D导航-就是要一口气刷十圈
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
未来世界被Ai统治,只会变形怎么拯救世界!?
最酷人形,我们做到了!
一种用于杂乱环境中自主导航的加速避碰运动规划器
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
CARLA实操,带你玩转常用地图格式转换及可视化
智在臂得,3D深度视觉机械臂轻松搞定三维空间环境感知,体积测算、空间抓取,简直超酷!
还是齿轮减速靠谱,机械臂写3毫米汉字
全网最低成本—具身智能机械臂+实操课程