V
主页
京东 11.11 红包
ROS机器人Gmapping、Hector、Karto、Cartographer四种常见SLAM算法效果演示
发布人
Gmapping、Hector、Karto、Cartographer四种常见SLAM算法效果演示、 0:0~2:16 Gmapping 2:16~4:16 Hector 4:17~6:27 Karto 6:28~8:53 Cartographer
打开封面
下载高清视频
观看高清视频
视频下载器
rtabmap ros使用RGBD摄像头建图导航
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
SLAM为什么需要IMU
SLAM-Viewer,SLAM便捷可视化小工具
轮式里程计激光里程计视觉里程计区别是什么
听劝不要轻易入坑SLAM
视觉组 | YOLO自瞄终于能打中了
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
ROS机器人树莓派智能小车
未知环境探索——ROS2树莓派小车实时地图构建和导航
DOM-60 为机器人带来前所未有的感知能力
ROS控制 | 第一轮导航代码讲解
1000元一天的楼梯搬运工 VS 未来爬楼机器人
使用Gazebo仿真6轴机械臂,MoveIt规划轨迹并在Rviz中显示
机械手爬行
SLAM为什么需要闭环检测
视觉惯导融合SLAM内外参标定是关键
北邮大三创新实验项目--六足搜救机器人(基本动作+上下台阶)
画了一个机器人ROS开发板
Go2开发教学10-SLAM 导航服务接口
除了激光SLAM和视觉SLAM还有哪些研究方向
【教程】"我造了一个球平衡机器人"【开源】
stm32+uno 大二毕设机械手 你想要一只真正的机械手吗?少年 肌电信号检测 舵机驱动
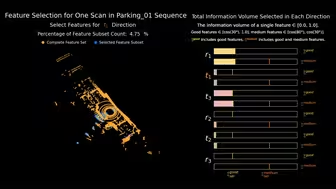
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
铰接式车辆的运动规划
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
Kalibr相机及IMU校准教程(Tutorial: IMU-camera calibration)
ChainSLAM实时建图演示
树莓派RP2040插值竟然也能这么流畅
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
A Compact LiDAR Odometry and Mapping with Dynamic Removal
为什么需要多传感器融合
两个gapyear老登说国庆没事做一下新赛题😆
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
树莓派 5 测试 yolo 不加 hailo 效果
树莓派rp2040插值居然也能这么流畅
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
SLAM系统的2种设计范式
Fast LIVO 硬同步过程释疑
树莓派配置YOLOv8环境(4)YOLOv8环境配置