V
主页
京东 11.11 红包
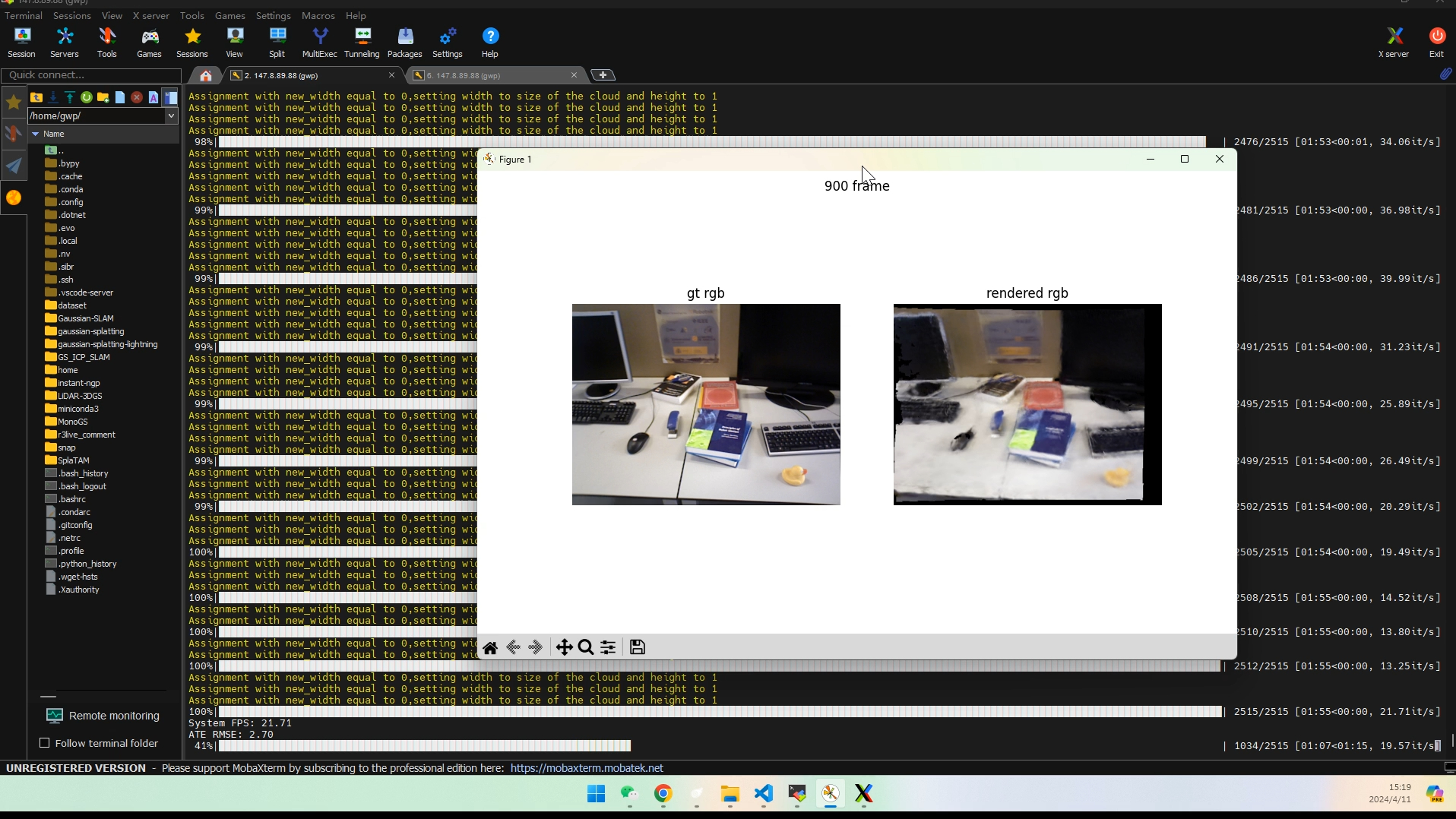
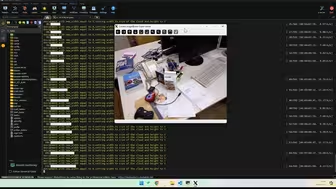
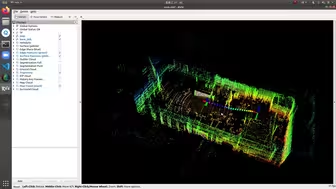
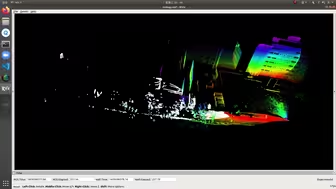
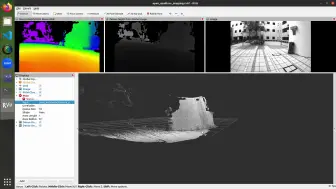
RGBD GS-ICP SLAM渲染结果
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg1_desk
Gaussian-SLAM testing tum
GS-LIVOM (Environment Guideline)
DPVO testing 0482
Gaussian Splatting SLAM
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
FAST-LIVO测试之—LiDAR_Degenerate
SLAM为什么需要IMU
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)
MSCKF-VIO
3DGS cpp-version GPU3060, 343.913 seconds, 6000 Iterations, 数据:truck, psnr 23.86
FAST-LIVO测试之——hku2
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg2_xyz
DPVO testing 0492
LONER:LiDAR Only Neural Representations for Real-Time SLAM
SplaTAM Testing using TUM-Dataset freiburg1_desk2_seed0(训练过程可视化)
two_turtlebot2_LiDAR-SLAM_cartographer
Robust Dynamic Radiance Fields
视觉惯导融合SLAM内外参标定是关键
LIO-SLAM复现(3D LiDAR SLAM)
FAST-LIVO测试之——hku1
ImMesh testing and visualizing the VoxelMap
DVI-SLAM测试IMG_0495
基于HKUST数据集的LOAM_livox复现V2(3D LiDAR SLAM)
Mono-VINS-DenseMapping (单目稠密重建) 分辨率752*480
轮式里程计激光里程计视觉里程计区别是什么
vins_mono_l515
3DGS cpp-version GPU3090, 189 seconds, 6000 Iterations, 数据:truck, psnr: 23.79
FAST-LIVO测试之—Visual_Challenge
esvo_core
(ccmslam)基于三个agents的单目SLAM地图融合
Simulation for ORB-SLAM
Fast LIVO 硬同步过程释疑
(激光雷达实时三维重建)ImMesh Testing using hku_main_building
基于amcl-icp的2D-LiDAR Turtlebot2定位与导航
3D Gaussian splatting 结合雷达点云重建
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
3DGS cpp-version GPU3090, 265 seconds, 6000 Iterations, 数据:train, psnr:21.28
SLAM为什么需要闭环检测
fastlio_testing3