V
主页
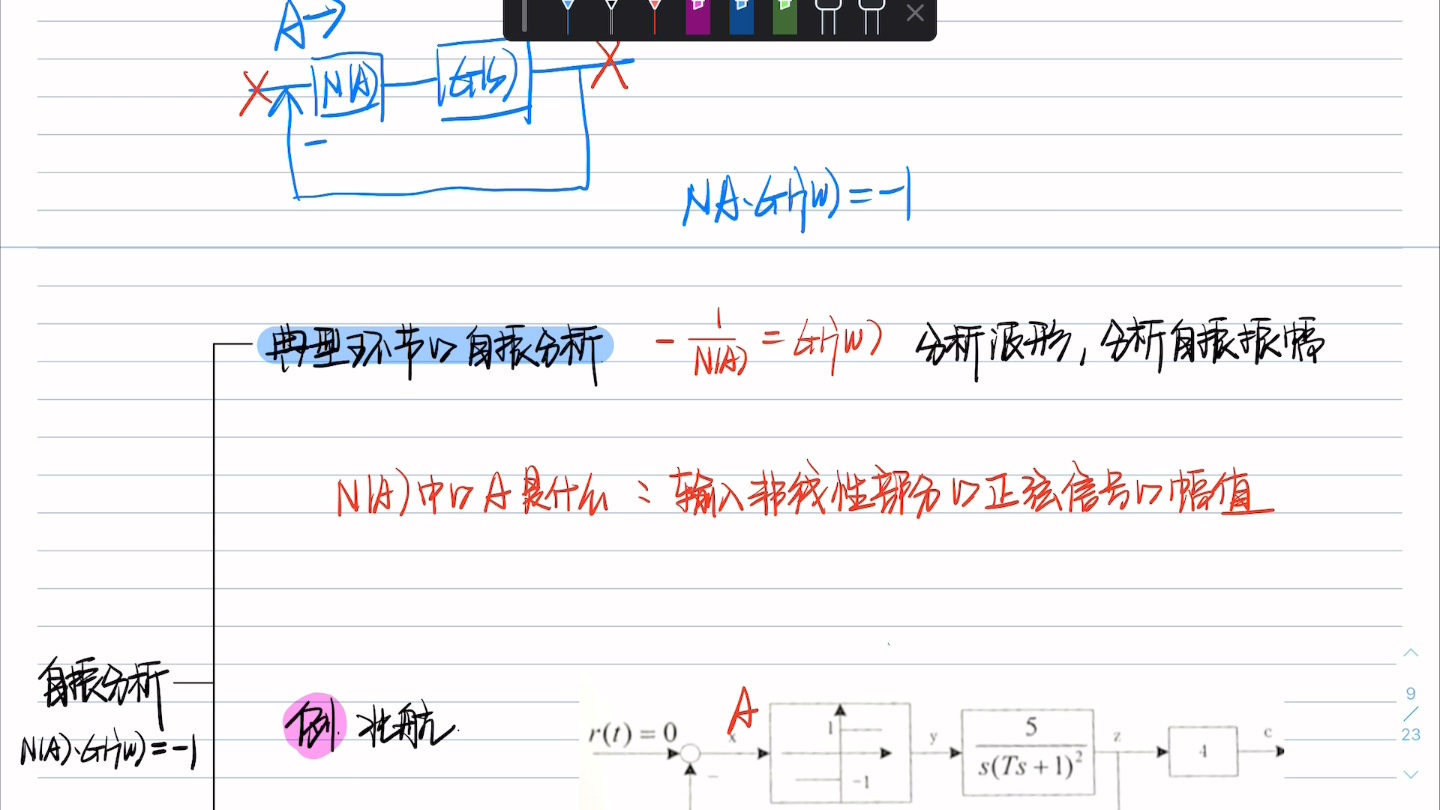
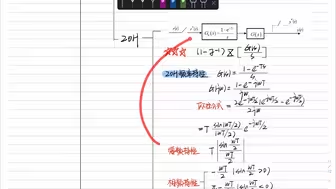
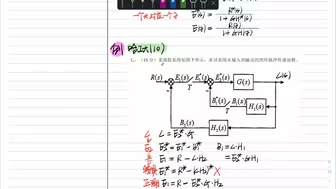
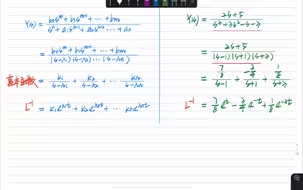
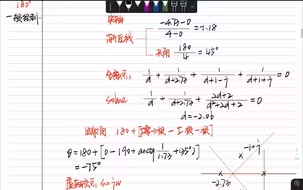
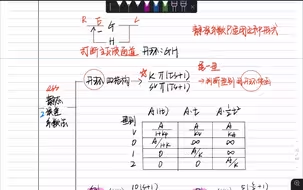
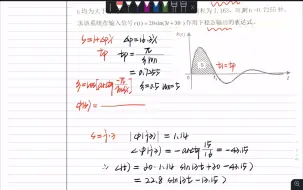
自动控制原理-第七讲-描述函数法-(2 自振的定量计算)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
自动控制原理-第七讲-描述函数法-(3 非典型环节)
自控控制原理-第七讲-描述函数法-(1 自振的定性分析)
自动控制原理-第三讲-根轨迹-(1.1 根轨迹的一般概念与绘制)
自动控制原理-第六讲-离散系统-(2.1 离散系统数学模型)
自动控制原理-第六讲-离散系统-(3.2 离散系统稳定性判别)
自动控制原理-第二讲-线性系统的时域分析-(4 劳斯稳定判据)
《自动控制原理》速成课
自动控制原理-第二讲-线性系统时域分析-(5.1 静态误差)
自动控制原理-第六讲-离散系统-(1.1 Z变换)
自动控制原理-第六讲-离散系统-(4 稳态误差计算)
哈工大-自动控制原理-第四讲-频域分析 -(4.1 伯德图绘制)
自动控制原理-第一讲-控制系统的数学模型-(4 梅森增益公式)
自动控制原理-第一讲-拉普拉斯变换(2)
哈工大-自动控制原理-第四讲-频域分析-(5 幅值裕度和相角裕度)
自动控制原理-第一讲-拉普拉斯变换(3)
自动控制原理-第六讲-离散系统-(3.1 离散系统稳定性判别)
自动控制原理-第一讲-控制系统的数学模型-(2.1 由物理模型列写传递函数)
自动控制原理-第六讲-离散系统-(2.2 离散系统数学模型,离散系统梅森增益公式)
自动控制原理-第一讲-拉普拉斯变换(1)
自动控制原理-第六讲-离散系统-(1.2 Z变换)
自动控制原理-第一讲-控制系统的数学模型-(1 传递函数的定义)
哈工大-自动控制原理-第四讲-频域分析-(2.1 奈奎斯特图的绘制)
自动控制原理-数学基础-拉普拉斯变换(3 拉普拉斯逆变换)
自动控制原理-第三讲-根轨迹-(1.2 根轨迹的绘制)
自动控制原理-第二讲-线性系统的时域分析-(3 高阶系统的时域分析)
自动控制原理-第二讲-线性系统的时域分析-(5.2 静态误差系数法)
哈工大-自动控制原理-第四讲-频域分析-(1 基本概念)
【2025自控考研基础课】自动控制理论/自动控制原理 第八章 非线性控制系统分析<上>
自动控制原理-第五讲-频域校正-(1 串联超前校正)
自动控制原理-第一讲-控制系统的数学模型-(2.3 由物理模型列写传递函数)
自动控制原理-数学基础-拉普拉斯变换(1 基本函数的转换)
自动控制原理-第二讲-线性系统的时域分析-(1.2 二阶系统的动态性能指标)
胡寿松自动控制原理第六版/第七版课后习题精讲
《自动控制原理》西北工业大学 卢京潮 (去黑边)
胡寿松《自动控制原理》第六版/第七版课后习题逐题精讲
哈工大-自动控制原理-第四讲-频域分析-(4.3 伯德图的修正)
自动控制原理-第五讲-频域校正-(3 串联迟后超前校正)
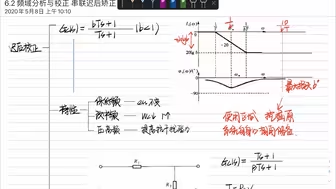
自动控制原理-第五讲-频域校正-(2 串联迟后校正)
自动控制原理-第二讲-线性系统的时域分析-(1.1 二阶系统的动态性能指标)
(最新超清版本!已降噪处理! ) 卢京潮 西北工业大学 自动控制原理