V
主页
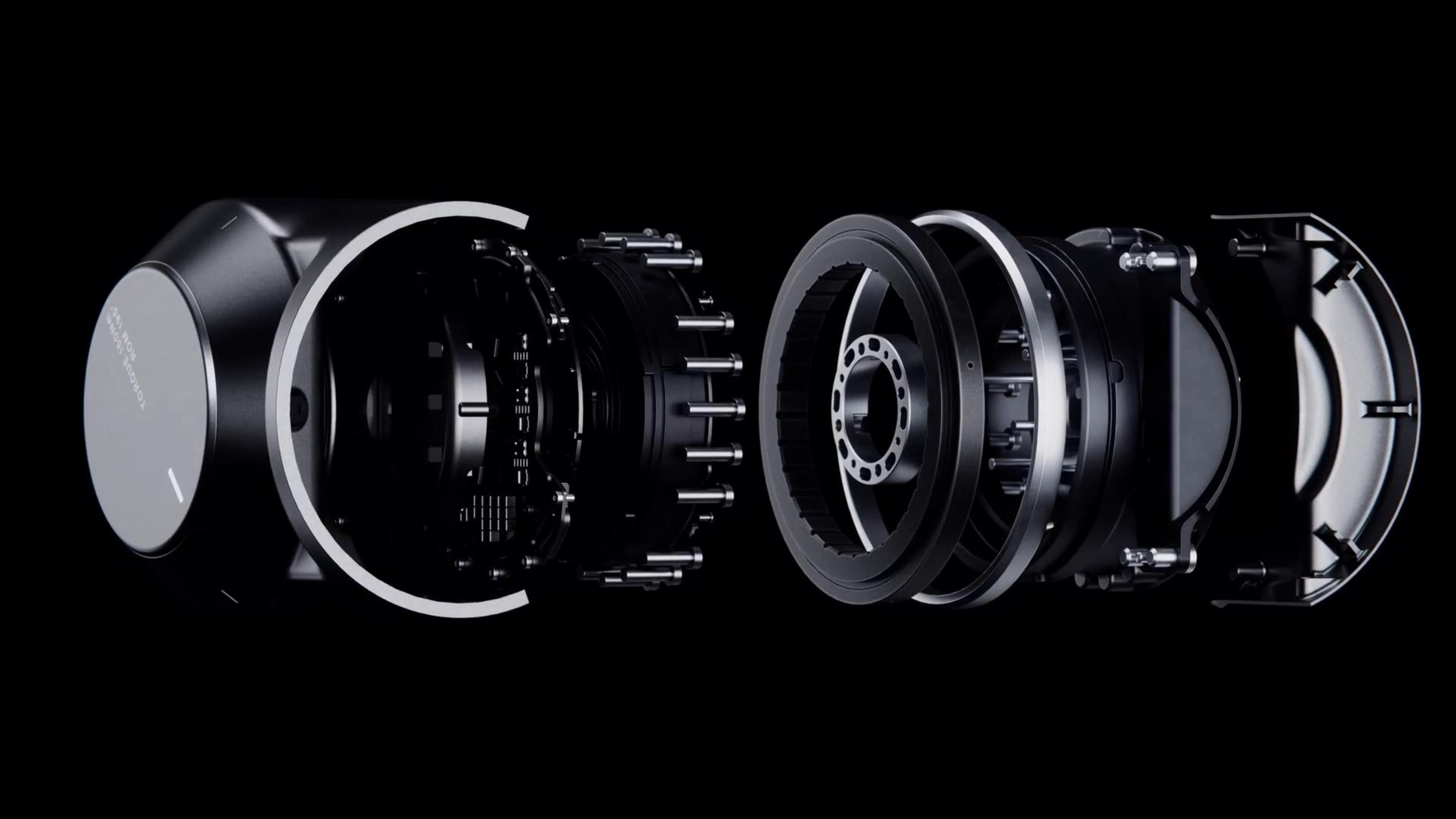
Figure 02 Trailer
发布人
https://www.youtube.com/watch?v=FZbY9sReu1k
打开封面
下载高清视频
观看高清视频
视频下载器
机器人关节运动和可视化
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
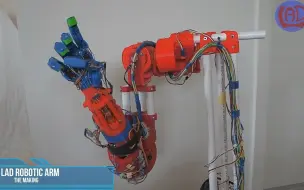
从零开始构建一个6轴机器人手臂
环形直流驱动器,高电流1-140A
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
自制机器狗-Kangal
如何做一个强大的无刷电机
机器人关节负载重复精度
国产驱动器,驱动关节电机测试
老铁们,一起来围观,重温下腾讯成员!! 来自Robotics X 实验室的机器人Ollie~ (21年6月发)
灵巧手,进化!
Tq无框电机
拥有仿生肩胛骨的人形机器人
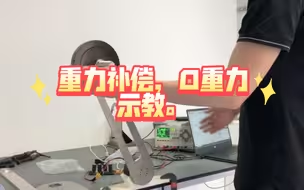
重力补偿,0重力示教。
无力矩传感器的力矩控制效果,建模加观测器算法,电流环反馈负载的力矩,动力学模型计算应该的力矩,对比得到力矩突变,做的碰撞检测。
浙江大学第四代表情机器人“小瑶”,这你受得了吗?
外观检测,协作机器人
LAD机械臂-制作- 3D打印- 5个伺服DIY
空心杯电机在人形机器人的应用
外转子无框电机模组
减速电机模组,机器人关节,正反转调速测试。
宇树 H1 升级版 自由度展示#人形机器人
四足机器人:小跑步态|改变行走方向
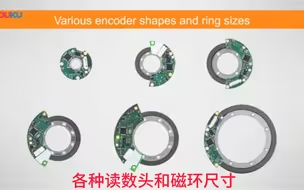
单圈or多圈绝对式编码器,增量编码器,大中空,超薄分体式。
国产大电流140A直流伺服驱动器,人形机器人,四足机器人,特种设备等
爬壁机器人,这个蜘蛛侠机器人可以利用电磁脚爬上墙壁和附着在天花板上(翻译)
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
TQ-RoboDrive |世界最先进的drive
桌面人形机器人行走再优化 动作更流畅 行走更稳定
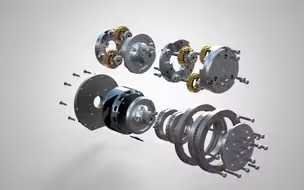
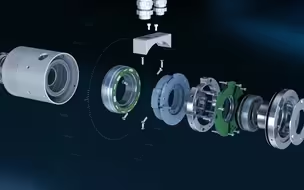
(翻译)动画视频-低间隙行星齿轮箱的设计和工作原理
天工泛化移动新进展:从室内到户外,从本体感知到视觉感知
Aksim-2雷尼绍编码器,多用于机器人关节,最大20bit分辨率
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
全新一代人形机器人关节模组
震惊!小壮讲故事,眼睛瞪得像铜铃
腾讯Robotics X实验室公布了「灵巧操作机器人」研究进展,目的很明确——致力于服务大众生活。
绝对编码器工作原理
云深处四足机器人,机器狗
宇树四足机器人,深度体验,好想拥有一台。
微型伺服驱动器,适合各种电机,目前已经在很多人形机器人,四足机器人,半导体设备,特种军工机器人和设备等,欢迎咨询