V
主页
ROS小车 SLAM+导航+全覆盖路径规划
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
gazebo仿真ros小车路径规划与避障
扫地机弓形全覆盖算法
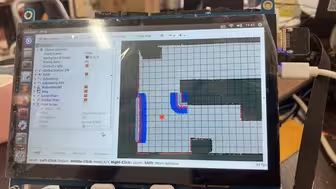
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
ros小车 激光雷达slam 建图
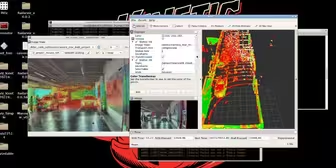
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
智能车SLAM室外路径规划
STM32的ROS小车
毕业设计展示-基于ROS的智能移动机器人 自主导航系统设计与实现-乘坐电梯实验
ROS小车SLAM功能演示
ROS-SLAM导航车
GPS导航小车,自主导航,避障,路径规划,stm32,esp8266,pid。GPS导航小车,小车可自主到达目的地,具有一定的避障和路径规划能力。
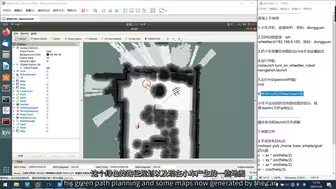
全覆盖路径规划算法
自主清洁机器人仿真 全覆盖路径规划与自主探索
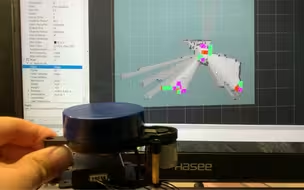
手持最便宜的激光雷达跑Cartographer实时建图
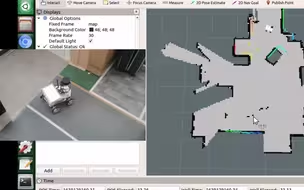
ROS智能无人小车室内自主导航
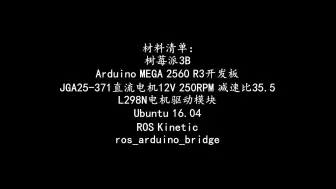
【ROS小车】树莓派SLAM小车
全覆盖路径规划——应用于扫地机器人(C++版本)
ROS机器人小车_SLAM_雷达_建图_导航
Ros实现全覆盖路径,毕设实现小一半咯
【小R科技】树莓派ROS SLAM激光雷达车 激光建图 实时导航 自主路径规划 摄像头视觉巡线
基于栅格的生物激励神经网络弓字形全覆盖路径规划
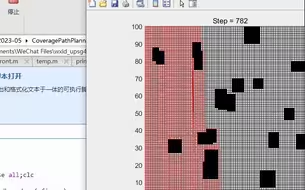
MATLAB实现全覆盖路径规划算法
ROS小车自由路径导航
ROS路径规划Gazebo仿真Rviz导航机器人实现
毕设演示:基于ROS的激光SLAM导航。它甚至跑起来了
智能车SLAM室内路径规划
3分钟搞定激光SLAM建图,居然如此简单!
【转载】将牛耕式全覆盖路径规划作为广义旅行商问题重新审视
二、ROS小车视频教程
ROS小车演示视频
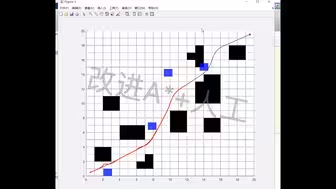
路径规划算法 A*和人工势场融合 动态路径规划
毕业设计:基于ROS的移动机器人智能抓取研究与实现
《机器人SLAM导航核心技术与实战》书籍配套教学视频
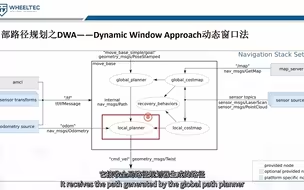
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
基于ROS的机器人建图与导航仿真全过程
70分钟快速入门Gazebo机器人仿真
《开源》stm32F407小车驱动板,ROS小车驱动板。
ROS如何用激光雷达建图
全覆盖路径规划算法(CCPP),基于OpenCV-Python的实现
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统