V
主页
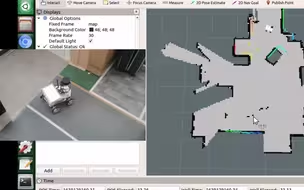
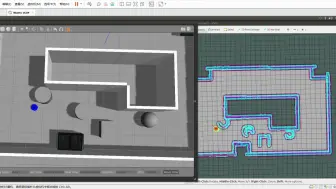
gazebo仿真ros小车路径规划与避障
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
路径规划算法大全,我会把市面上有的算法都收集放在群里面。关注我,才有动力更新,要资料看up主页
丁帧教你ROS基于Gazebo实现机器人自动路径规划和视觉识别
在Gazebo仿真环境下基于ROS的自动驾驶小车
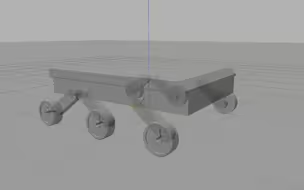
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
Unitree 2023 ROS暑期学校课程视频01-搭建Gazebo仿真环境玩转四足机器人(上)
全覆盖路径规划——应用于扫地机器人(C++版本)
【ROS】机器人小车Gazebo仿真
仿真环境SLAM与路径规划演示
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
【ROS】使用Gmapping算法建图与A*路径规划算法导航的智能小车,GUI界面显示
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)
我的毕设演示:基于激光雷达的智能巡检小车
Gazobo仿真环境下的自动驾驶小车
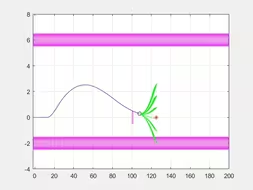
hybrid A*路径规划,加上了纯跟踪控制
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
自动驾驶路径规划与控制-ROS仿真实现
ROS控制小车_rviz显示
ros2 humble + gazebo 环境下实现自动驾驶仿真
四足机器人纯位置控制gazebo仿真,验证学习过程中仿真控制、运动学、FSM和步态相关
ROS小车演示视频
Gazebo_Tutorial_1_机器人建模
ROS入门选择性学习思路,合理跳过指南
基于ROS的全覆盖路径规划算法
STM32的ROS小车
如何使用Gmapping进行SLAM建图
ROS动态避障仿真
ROS小车 SLAM+导航+全覆盖路径规划
5.gazebo安装
基于DWA动态避让路径规划算法
【路径规划Gazebo仿真】自适应DWA与传统DWA路径规划效果对比
超精简8分钟ros入门教程,实战前够用的基础知识。茴字有四种写法,但你只要会一种
XJU移动机器人仿真-第1期 环境搭建(gazebo模型 插件 urdf rviz)
ROS机器人未知环境自主探索大地图测试效果演示
SLAM阿克曼小车Gazebo自主导航仿真视频
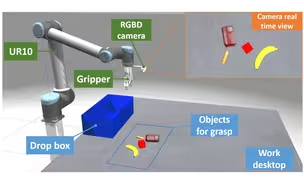
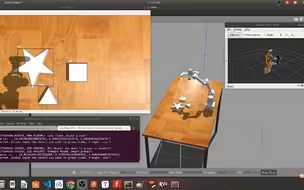
基于Moveit与yolov5的gazebo仿真(开源填坑)
基于ROS的机器人建图与导航仿真全过程
基于ROS搭建仿真环境——A ROS based Open Source Simulation Environment
【ROS路径规划快速入门】ROS1 A星+PID 运行平台
【公开课】古月精讲 · ROS移动机器人实战 | ROS入门必看!
全局路径规划 路径跟踪