V
主页
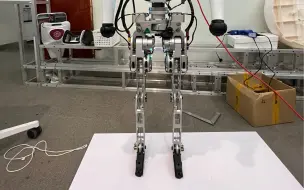
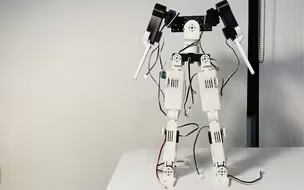
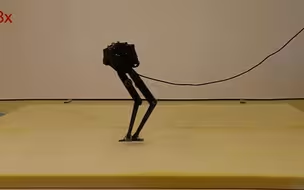
南科大第二代点足式 双足机器人 (室外多地形行走测试)
发布人
实验室新一代3D点式双足机器人长高了不少,基本达到了ASIMO全尺寸人形机器人下半身的高度, 可以在室外多种地形稳定行走!
打开封面
下载高清视频
观看高清视频
视频下载器
山东大学机器人中心电动腿足组 | 双足机器人-BRAVER
开源人形双足机器人
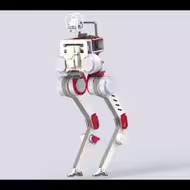
关键运动控制环节采用行动元驱动器的南科大3D点足式双足机器人
想去哪就去哪!瑞士双轮机器人,轻松适应各种高难度地形
日本网友制作的人已经可以完全拟人态行走,可以根据自动调速跑步机行走
轮式双足机器人制作花絮
对标波士顿机器人出动敏捷机器人
上海理工大学双足人型机器人—抗扰测试
双足机器人第一次行走
液压双足之团队扩建
上海理工大学双足机器人—全新小贝4.0直立行走
山东大学机器人中心电动腿足组 | 双、四、六足机器人总动员
山东大学机器人中心电动腿足组 | 基于深度强化学习的四足机器人多技能稳定学习
上海理工大学双足机器人—不再“卑躬屈膝”
上海理工大学双足人型机器人—性能测试
舵机双足机器人2上电测试
做深蹲的双足机器人测试
开源双足机器人Bolt的3D原地踏步测试视频
小鹏发布首款自研人形机器人PX5
液压双足机器人DRACO测试
国产低成本双足机器人手动力控
开源双足人形机器人运动控制代码启动演示
人形机器人在学跳一跳
在新的双足机器人“'Bolt'”上进行的首次成功测试
逐际动力发布首款四轮足机器人,以运动智能突破足式产品的落地和应用
遥操作Little HERMES双足机器人|2019【MIT】
轮足四足机器人 移动性的未来
我们做了一款双足机器人
Lec0:课程简介、为什么和如何学基于screw theory的机器人运动与动力学
【首次公开】腾讯人工智能轮腿式机器人Ollie来了│360度空翻、跳跃、跃障、双轮平衡、多模态移动
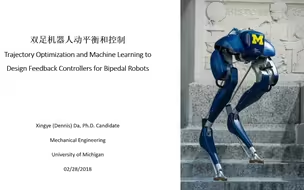
密西根大学达兴烨-双足机器人动平衡和控制
开源双足机器人Bolt抗干扰,不平地面等一系列测试
液压双足人形机器人
宇树科技 第二十届robocon比赛现场
开源双足机器人
Lec1: 矩阵指数与线性系统解析解
小鹏首发自研人形机器人
前沿| 开源双足机器人BRUCE,用于研究和教育的仿人机器人
双足机器人奔跑实验与人步态“神同步”
视觉 +力控 peg in hole