V
主页
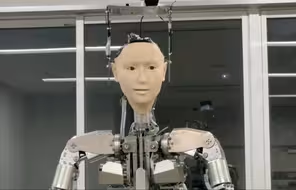
全尺寸人形机器人Adam仿人运动 Whole-body Humanoid Robot Adam Locomotion with Human Reference
发布人
Whole-body Humanoid Robot Locomotion with Human Reference. arxiv: https://arxiv.org/abs/2402.18294 Qiang Zhang1,∗, Peter Cui2,∗, David Yan2, Jingkai Sun1, Yiqun Duan3, Arthur Zhang2, Renjing Xu1,†. 1. Hong Kong University of Science and Technology (GZ) 2. PNDbotics 3. Human Centric AI Centre, Australia Artificial Intelligence Institute, University of Technology Sydney 2007 Ultimo Recently, humanoid robots have made significant advances in their ability to perform complex tasks due to the deployment of Reinforcement Learning (RL), however, the inherent complexity of humanoid robots, including the difficulty of planning complex reward functions and training entire complex systems, still poses a notable challenge. To conquer these challenges, after many iterations and in-depth investigations, we have meticulously developed a full-size humanoid robot, 'Adam', whose innovative structural design greatly improves the efficiency and effectiveness of the imitation learning process. In addition, we have developed a novel imitation learning framework based on an adversarial motion prior, which applies not only to Adam but also to humanoid robots in general. Using the framework, Adam can exhibit unprecedented human-like characteristics in locomotion tasks. Our experimental results demonstrate that the proposed framework enables Adam to achieve human-comparable performance in complex locomotion tasks, marking the first time that human locomotion data has been used for imitation learning in a full-size humanoid robot. If you are interested in this humanoid robot, feel free to contact me (peter.htcui@gmail.com, peter.cui@pndbotics.com). :-)
打开封面
下载高清视频
观看高清视频
视频下载器
仿生视界,未来已来——探索具备视觉跟踪功能的仿生人形机器人
自动识别功能的仿生人形机器人
山东大学机器人中心电动腿足组|人形机器人运动与全身控制
从零驯服双足机器人day7
老年照护的未来?——人居环境机器人“5号”(The Five,小五)
这才是全球 | 运动能力 | 真正最强的新秀 液压机器人 | Nadia |波士顿动力| Atlas | 人形机器人 | 智能机器人 | 机器人|
腾讯公布最新机器人研究进展,2030年我国人形机器人规模或达8700亿
仿人机器人
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
中国又多了只 | 天选打工人 | 普渡机器人PUDU D7 | 轮式机器人|人形机器人|智能机器人 | 打工机器人 | 普渡机器人 |
人形机器人——以产业发展视角探究
阿米园高仿生人形机器人
未来已来,高仿生机器人惊艳登场,人类或将拥有“机械伙伴”
最像人的人形机器人真来了
Humanoids 2024 NAS: N-step computation of All Solutions to footstep planning
阿米园高仿生人形机器人
摆臂机器人
机器人聊天聊什么?
国产人形机器人进厂打工,搬运物品有模有样,还能应对突发情况
体验Isaac sim4.2中的人形机器人示例
AI制作小电影,人人都是大导演,本地部署实操教学
宇树 H1 升级版 自由度展示#人形机器人
机械眼:智能科技新突破,精确控制下的自然之美
德国也开造人形机器人,这你受的了吗?
卡耐基梅隆 Neural Feels with Neural Fields: 视觉-触觉感知在手持操纵中的应用
大家好,我是天链人形机器人T1Pro🤝🏻
未来已来!NEO Beta 开启家庭机器人时代!
OpenAI人形机器人之未来以来?
具身智能基础简述
搜维尔科技:使用Xsens动作捕捉系统和ai训练人形机器人模仿人类运动,执行复杂任务
机器人运动扩散模型:机器人角色的运动生成|2024【迪斯尼】
1X发布了最新一代的人形机器人NEO Beta 家用型的人形机器人
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
AI新作 | ALOHA赋能机器人模仿学习复杂任务
与机器人对视的那一刻,我就爱上了“它”…
遇见G1未来已来?#人形机器人
【LeRobot】中文字幕|ThisThat:Lerobot Tech Talk 7 by Jeong Joon Park
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能