V
主页
京东 11.11 红包
数学建模-确定性数学方法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
数学建模
数学建模-不确定性数学方法
数学建模--优化问题
数值分析 | 第一章习题讲解
矩阵理论 | 1.2a线性空间的基与维数
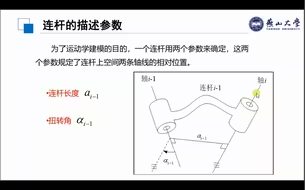
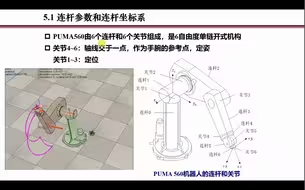
机器人学 l 3.1 连杆参数和关节变量
数值分析 l 第21讲 线性方程组的固有性态
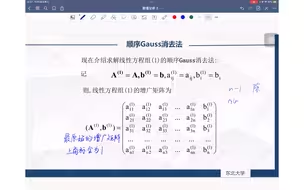
数值分析 l 第12讲 l 顺序高斯消去法
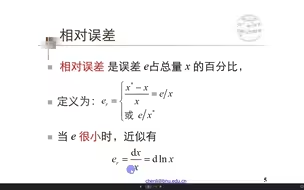
数值分析 | 第五讲 误差及其来源
机器人学 | 2.3 齐次变换矩阵及其三重物理意义
读书分享 I 社交恐惧症第一期分享
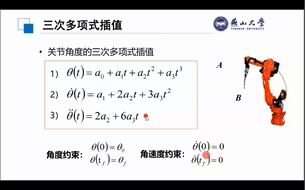
机器人学 l 7.2 轨迹规划中的三次多项式插值
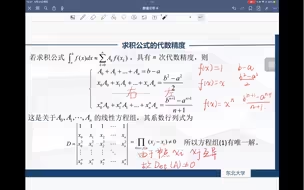
数值分析 l 第37讲 数值求积公式的代数精度
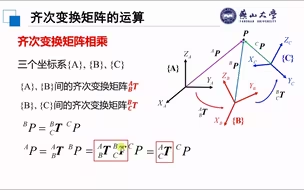
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
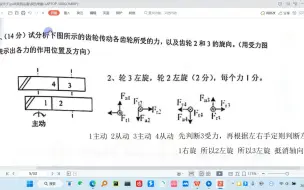
机械设计 | 齿轮受力方向判断 | 齿轮旋向判断
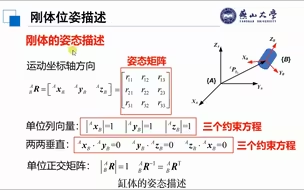
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
数值分析 | 拉格朗日插值以及截断误差的估计
自动控制原理|稳态误差|判稳不可少
数值分析 | 第六讲 有效数字
机械设计/齿轮受力方向判断/涡轮蜗杆受力方向判断
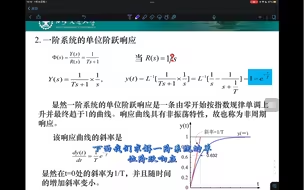
自动控制原理/一阶系统数学模型/阶跃响应/改善性能方法
自动控制原理/西安交通大学/数学模型/微分方程
周二下午公休 有时间录一个视频
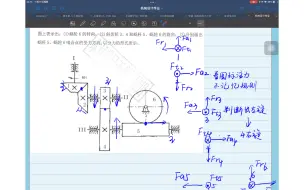
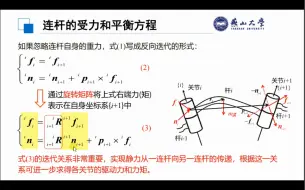
机器人学 l 3.7 连杆的受力与平衡方程
高中数学
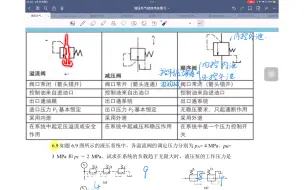
液压与气动技术 | 溢流阀 减压阀 顺序阀讲解
机器人学 l 7.3.2 笛卡尔空间中的轨迹规划
九上数学【第一次月考】,学会白捡30分!
液压与气动技术 l 液压基本回路习题讲解1-4
自动控制原理|数学模型|自学
知行合一 l [想的多做的少]现象的剖析
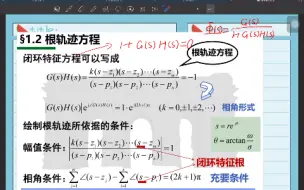
自动控制原理/相角条件/根轨迹
机械设计/受预紧力和工作拉力的螺栓连接
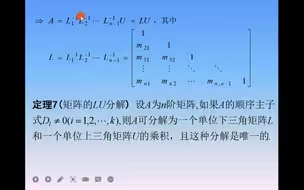
数值分析 | 第14讲 | 矩阵LU三角分解(举例)
自动控制原理/梅森公式/误差传递函数
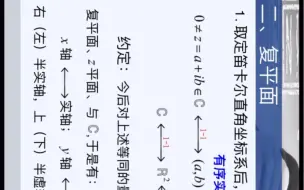
复变函数 l 第一讲 l 复数域和复平面
自动控制原理/复阻抗法求传递函数
英语词汇记忆/英语口语
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
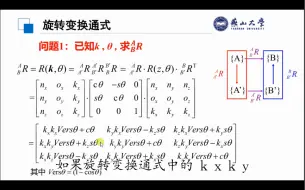
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)