V
主页
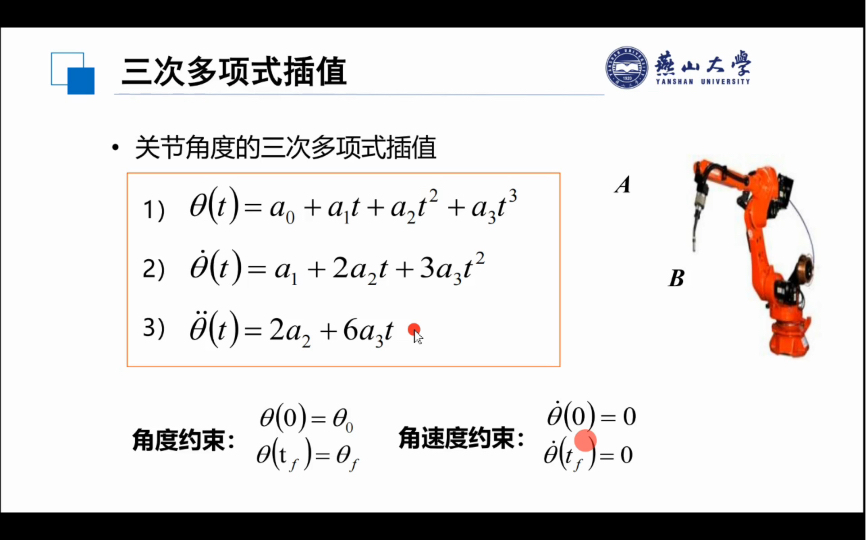
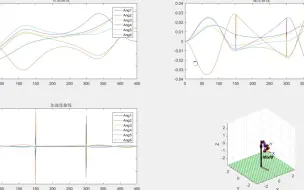
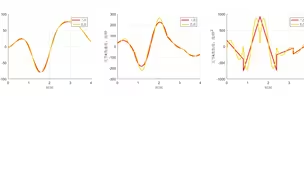
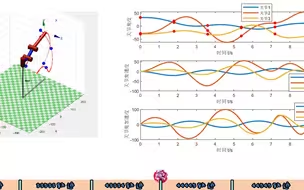
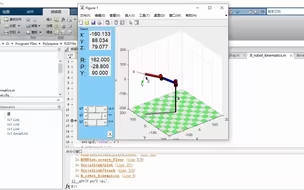
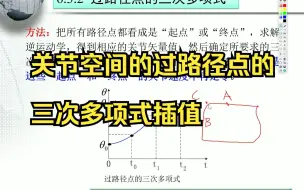
机器人学 l 7.2 轨迹规划中的三次多项式插值
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
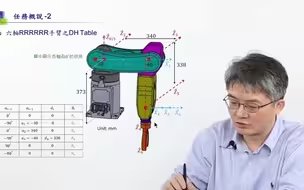
机器人DH法、运动学、雅克比(Jacobian)矩阵
机器人路径规划、轨迹优化课程-第十讲-多项式轨迹与Minimun Snap原理讲解
【轨迹规划】多项式轨迹规划(三次点到点,五次连续过中间点)
轨迹规划和生成|三次多项式|抛物线混合
轨迹规划与跟踪控制
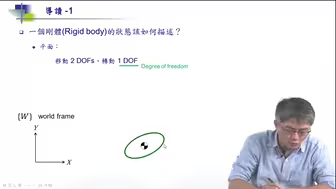
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
6-6关节空间的高阶多项式插值
机器人路径规划、轨迹优化课程-第四讲-A*算法原理和代码讲解
机器人路径规划、轨迹优化课程-第十六讲-基于贝塞尔曲线与硬约束的轨迹优化方法简介
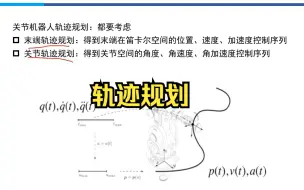
轨迹规划
学术论文上B站:点进来你就能学到一种轨迹规划算法
基于3-5-3分段插值的粒子群时间最优的轨迹规划算法
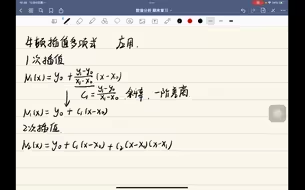
数值分析02-牛顿插值多项式(例题)Newton
6-3关节空间的轨迹规划
五次&三次多项式连续轨迹规划
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
新手入门三次多项式插值
MATLAB机械臂轨迹规划(任务空间+关节空间)
4-23轨迹规划
6-4关节空间的三次多项式插值
6-1路径描述及轨迹生成
【Matlab】轨迹规划——避障
6-13轨迹规划的Matlab仿真
待定系数法求三次样条插值,手把手教,包教包会,come in
三次拉格朗日插值多项式例题
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
6-5关节空间的过路径点的三次多项式插值
机器人学 l 7.1 机器人轨迹规划的相关概念
路径规划与轨迹跟踪系列算法学习_第1讲_Dijkstra算法
12.机械臂复杂轨迹规划
机器人路径规划、轨迹优化课程-第八讲-基于遗传算法的路径规划算法理论和代码讲解
六自由度机械臂五次_七次多项式样条插值曲线_五次B样条曲线插值【三套代码】
【数值分析】三次样条插值函数知识点总结及例题讲解
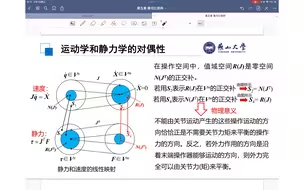
机器人学 l 3.8 力雅可比矩阵以及运动学和静力学之间的对偶关系
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
五次非均匀B样条S型轨迹规划
数值分析:12三次样条插值#数值分析#插值#期末复习
8. 机械臂轨迹规划实例