V
主页
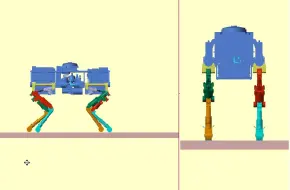
【Sim to Real】仿真与现实的差距
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人强化学习sim to real(walk these ways)
【开源】强化学习sim to sim
【RLChina论文研讨会】第45期 赖行 Sim-to-Real Transfer for Quadrupedal Locomotion
借助 NVIDIA Isaac Sim 缩小 Sim2Real 差距
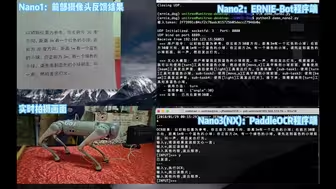
用文心一言让机器狗快速进化!看一遍就知道自己要干啥
使用Isaac-sim训练双足机器人行走
斯坦福炒虾机器人爆火全网,华人团队成本22万元,能做满汉全席还会洗碗
sim2real gap有点大啊
IsaacGym强化学习GO1机器狗Trot步态迁移
KAIST Hound, 四足机器人百米跑,世界记录保持者
ICRA-sim2real实测阶段-DLUT-国际一等奖(我曾经迷信科学)
四足强化学习多步态Sim2Real迁移
机器人sim2real
四足机器人行走测试
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
主流四款机器狗雪地大比拼
【强化学习】丝滑!四足机器人飞跃上墙
【Sim2real】02 自定义ROS_control实现反馈控制
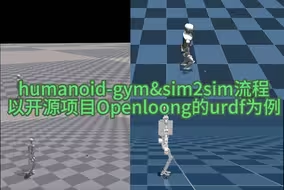
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
总算是在过年前完成了四足机器人MPC!
【强化学习|机器人|部署】sim2real主流方法介绍(共四篇论文)
恶霸犬遇到机器狗,看似稳如狗,其实内心慌的一批!
机器狗冰面测试
【开源】宇树Go2强化学习部署Demo - walk-these-ways-go2
【强化学习】yaw关节对双足机器人转向的影响
宇树 Unitree B2 又进化了,有极限吗?
基于sim2real的四足机器狗运动控制
宇树发布丨Unitree B2 突破极限 超进化!
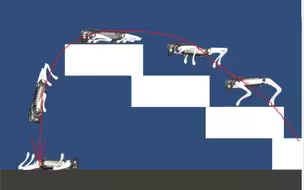
【强化学习】四足机器人上下楼梯
宇树发布: Unitree Go2 具身智能 新物种 9997元起
【强化学习】双足机器人立定跳远跨越沟壑
街头围观土狗大战“机器狗”
感受一下波箱齿轮转动的魅力
基于强化学习的go2 sim2real部署展示(业余爱好大佬勿喷)
【ML-Playground】单个神经网络实现多任务运动
“仿生”是机器的生命力 宇树Go2机器狗评测!
【强化学习】登高跳崖以头抢地的狗子
比我这个人类颠球颠的好
【搬】球形齿轮关节机械臂
结合地形感知的端到端强化学习四足控制