V
主页
【开源】强化学习sim to sim
发布人
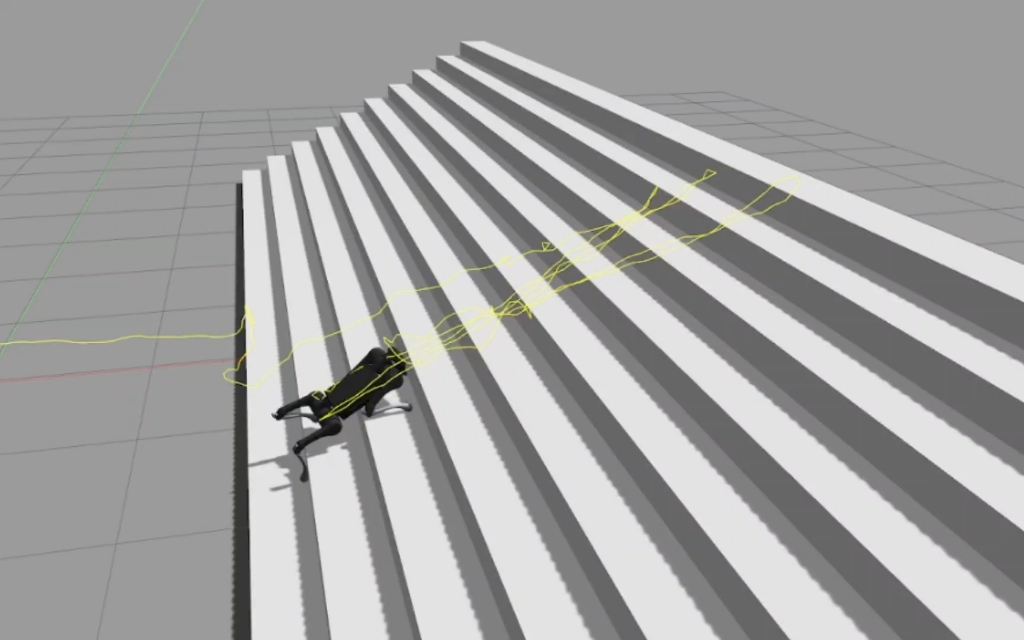
https://github.com/fan-ziqi/rl_sar sar意为sim and real,本仓库同时有isaacgym-gazebo和isaacgym-real的功能,视频战展示的是gazebo的仿真效果。 但real还有问题,暂时请勿尝试。
打开封面
下载高清视频
观看高清视频
视频下载器
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
结合地形感知的端到端强化学习四足控制
【通用】人形机器人RL策略Gazebo二次仿真框架
适用于强化学习的并行qpmpc求解器
基于IsaacLab的人形机器人强化学习
高擎机电运动控制算法开源|强化学习篇
四足机器人强化学习sim to real(walk these ways)
经典内模估计+强化学习,四足机器人训练一小时,即可穿越任意地形
机器人强化学习再无环境问题-傻瓜式docker配置脚本
基于强化学习的机器人控制策略
山东大学机器人中心电动腿足组 | 基于深度强化学习的四足机器人多技能稳定学习
小米铁蛋强化学习上楼梯,代码抄的
【四足机器人】并行强化学习调参 MPC
【开源】宇树Go2强化学习部署Demo - walk-these-ways-go2
深度强化学习训练平衡步兵机器人开源
四足机器人纯位置控制gazebo仿真,验证学习过程中仿真控制、运动学、FSM和步态相关
香港大学&南科大!基于强化学习和速度障碍法的多机器人导航
isaacgym-一周实现从四足到两足的奔跑
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
【强化学习的数学原理】课程:从零开始到透彻理解(完结)
IsaacGym强化学习GO1机器狗Trot步态迁移
乖乖,强化学习训练的机器狗!
四足机器人强化学习盲爬楼梯
四足机器人纯本体感知强化学习
【强化学习|机器人|部署】sim2real主流方法介绍(共四篇论文)
小米机器狗强化学习上楼梯
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
四足机器人多步态强化学习(仿真手柄控制)
小米不开我来开!小米铁蛋URDF与仿真(基于宇树开源代码)
四足机器人强化学习鲁棒运动
(RA-L 23) Reactive Landing Controller for Quadruped Robots
机械臂强化学习抓取
哪有小孩天天哭,哪有赌狗一直输
MorAL: 四足机器人复杂地形&形态自适应运动控制器
四足机器人鲁棒&高速移动的强化学习控制器
铁蛋:先睡了
【中文机翻】NVIDIA Isaac Gym
四足机器人无外部传感器上下20cm台阶
小米铁蛋后空翻仿真(基于宇树仿真框架与MIT代码)
【中文字幕】Reinforcement Learning - Steve Brunton