V
主页
dummy机械臂之usb命令功能详细分析
发布人
视频内容比较长,第一次尝试这么在线深度的分析代码,不足是必然,咱们着急的朋友可以看开始的总结就可以了。 源码gitee地址:https://gitee.com/switchpi/dummy 注意需要注释切到Fan-feature分支
打开封面
下载高清视频
观看高清视频
视频下载器
dummy从获取源码到环境搭建
稚晖君机械臂dummy复制之完整软件开发环境分享
dummy RGB实际效果
dummy v2版本发货,细节说明。
dummy机械臂mini8谐波减速器安装
dummy电机调试
dummy基础设置与回0点
V2版本机械臂分享
dummy校准0点补录
dummy 进度与rgb灯代码拉取
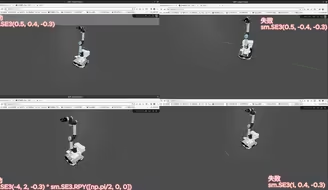
dummy路径规划-求助
【自制】我开发了一个通用机器人大脑!【硬核】
复刻稚晖君Dummy机械臂教程,完结撒花期待大家复刻成功(pid调试,home offset调试)
dummy减速器柔装
Dummy bug路上之串口与时钟
dummy 使用CLI-TOOl与串口调试电机
稚晖君dummy复刻之CNC工程图
dummy结构到货了吗大家久等了,这是第一批。
dummy调试
01-机械臂算法和ROS设置
dummy结构整装
[开源!!]体感机械臂代码讲解,无痛入门机械臂,小白也看得懂!
02-创建自定义机械臂
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
【OCS2机器人强化学习】初学教程(2)
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
【整整548集】别再走弯路了!2024最全最细自学Python全套教程,逼自己一个月学完,编程技术猛涨!从零基础小白到精通Python全栈只要这套就够了!
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
辩证视角看思维的三层进化:系统思维的核心要素和工作中的案例
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
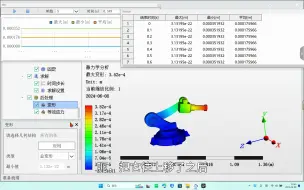
鱼海软件装配体机械臂静力学分析
【开源!】7分钟快速掌握机械臂软件框架
最后的几个零件终于凑齐了
有手就行的零基础6轴机械臂
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
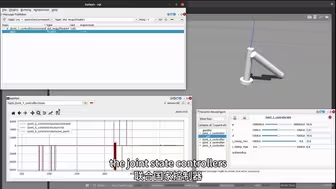
03-用于机械臂关节的ROS控制器(上)
UR5机械臂基于扩散策略执行推箱任务
【py】tqdm:程序显示进度条,配合 pandas 超好用
机械臂导纳控制 moveit与gazebo联合仿真
【超级C语言】清华大学终于把C语言做成动画片了,2024最新版C语言视频课程,C语言零基础,C语言基础入门,C语言程序设计,c语言速成