V
主页
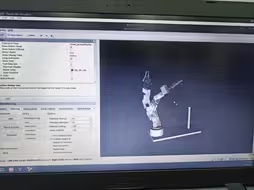
ROS建图rviz+gazebo
发布人
ROS建图rviz+gazebo技术
打开封面
下载高清视频
观看高清视频
视频下载器
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
基于多智能体强化学习的多小车建图与导航
套件教程-RTABMap之3D雷达定位与导航
ORB-SLAM2究竟是什么
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
C6-2智能车的建图与自主实现教程
走一走,摔一摔
基于yolo和moveit的图像识别机械臂目标抓取搬移
基于ros路径规划+避障演示
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
调车总不能炸机了吧(●'◡'●)
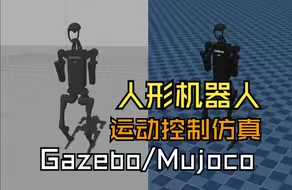
【人形机器人】在Gazebo/Mujoco中的仿真
五子棋分拣–法奥协作机械臂FR3 ROS MoveIt-数字孪生
【D531】上海三菱Elenessa ELE/OEN 自然博物馆全部客梯合集
没信号,咋搞?
【开源无人机】Vins_fusion代码讲解
2025工创赛物流搬运机器人 赛事解读与问题分析2
宇树K1机械臂的视觉抓取仿真
2025工创赛 物流搬运机器人场地 新鲜出炉 价格最低 质量保障
KMIL格式导入手簿,放样或作为底图。
[开源]江科大框架STM32 GPS经纬度获取实现(ATGM336)
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
[厉不厉害你机哥]ROBOCUP-国一客户案例-移动靶投放-Phoenix330科研竞赛无人机
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
【开源无人机】Ego_Planner程序控制飞行
华米popPro,21年的GPS手环
"误差"大,第一罪魁。
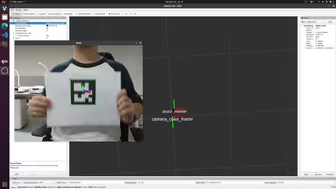
【考核用】调用opencv识别aruco码,在ros中更新tf
2025年工创赛 物流搬运机器人 全流程调试
【开源无人机】从零调试一架开源无人机
分地,面积分割。
【开源无人船】从零组装一艘开源ROS无人船
手簿网络不可用,咋搞?
场地平整,三种情况。
【开源无人机】舵机控制教学
如何判断GPS模块数据的输出格式
2025工创赛物流搬运机器人规则分析与备赛计划
超维小课堂(三十一):MAVROS无人机姿态控制接口
FrogMonster蛙蛙🐸的独家采访即将到来!
算是ros大作业,但是没在调车