V
主页
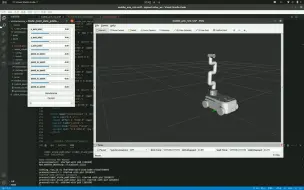
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
发布人
https://www.youtube.com/watch?v=-YSiJu7eNxk ROS case-study presentation by Martin Wermelinger as part of the ETH Zurich lecture "Programming for Robotics: ROS". https://ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/rsl-dam/ROS2017/case_study_2018_manypulator.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
通过优化理论指导设计双足以达到控制和任务的最优
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
人形机器人 手指机械结构
人形机器人足底机械结构设计
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
真牛!这个人形机器人吊打很多厂家的“产品”
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
人形机器人灵巧手臂最新成果
移动机械臂运动学仿真 ROS+rviz (地盘是全向车,简化为4个普通轮)
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
有开源github代码! RA-L论文 人形机器人的多接触全身控制
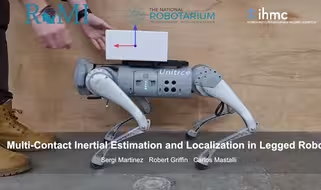
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
人形机器人腿部结构 基于 4DoF 球面并联机构
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
宇树K1机械臂的视觉抓取仿真
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Control is dead ?control+ learning才是未来
Bipedal Safe Navigation over Uncertain Rough Terrain
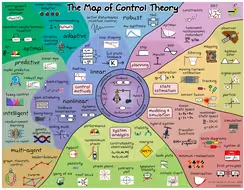
控制理论学习路线图
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
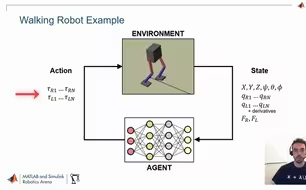
双足机器人的深度强化学习- MATLAB and Simulink
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
基于ros路径规划+避障演示
基于yolo和moveit的图像识别机械臂目标抓取搬移
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
呐, 这就叫优雅~
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
人形机器人远程视觉操纵 论文和代码在简介
NASA’s first humanoid robot Valkyrie is being tested in Australia
Consensus Complementarity Control for Multi-Contact MPC
人形机器人远程视觉操纵
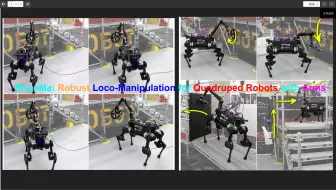
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
移动机械臂让土木工程焕发第二春