V
主页
第31课.机器人同步建图和导航
发布人
ROS理论与基础
打开封面
下载高清视频
观看高清视频
视频下载器
第1讲:认识ROS
第30课.机器人自主探索建图
第6讲:机器人SLAM与自主导航
第17课.Karto建图算法实现
第24课.机器人巡线代码讲解
第2讲:ROS基础
第02课.开发环境搭建
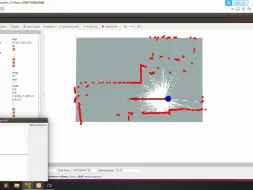
第16课.机器人gmapping建图
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
第21课.导航框架讲解
第8讲:ROS机器人综合应用
第5讲:机器人感知
第01课.麦克纳姆机器人开发必看
第08课.底层-编码器计算速度代码讲解
第9讲:ROS2.0
12步搭建智能机器人: 从设计到AI入门
第03课.ROS分布式组网
基于Gazebo的无人车激光SLAM建图与导航仿真
深度学习第6节
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
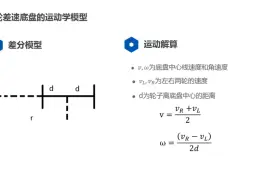
第2节 传感器数据处理I:里程计运动模型及标定
第26课.系统烧写课程指导
第09课.底层-电机PWM控制代码讲解
深度学习第9节
第00课.学习路线规划
端到端机械臂视觉抓取无人配送的场景演示
深度学习第4节
第27课.RGBD-Slam融合原理讲解
MoveIt与Isaac Sim结合使用
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
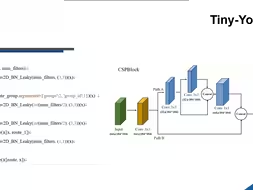
第33课.Darknet_ROS目标检测
第23课-机器人更换其他雷达讲解
第25课.雷达跟随代码讲解
尤瓦尔·赫拉利对谈张静初:AI正在制造慢不下来的人
ros系统rcfusion多模态复现
第01课.安装并配置ROS环境.avi
第15课.测试Service和Client.avi
第10课.底层-ROS层通信框架代码讲解
【开源无人机】ROS系统中yolo模型处理多摄像头
ROS与STM32通信编程(上)