V
主页
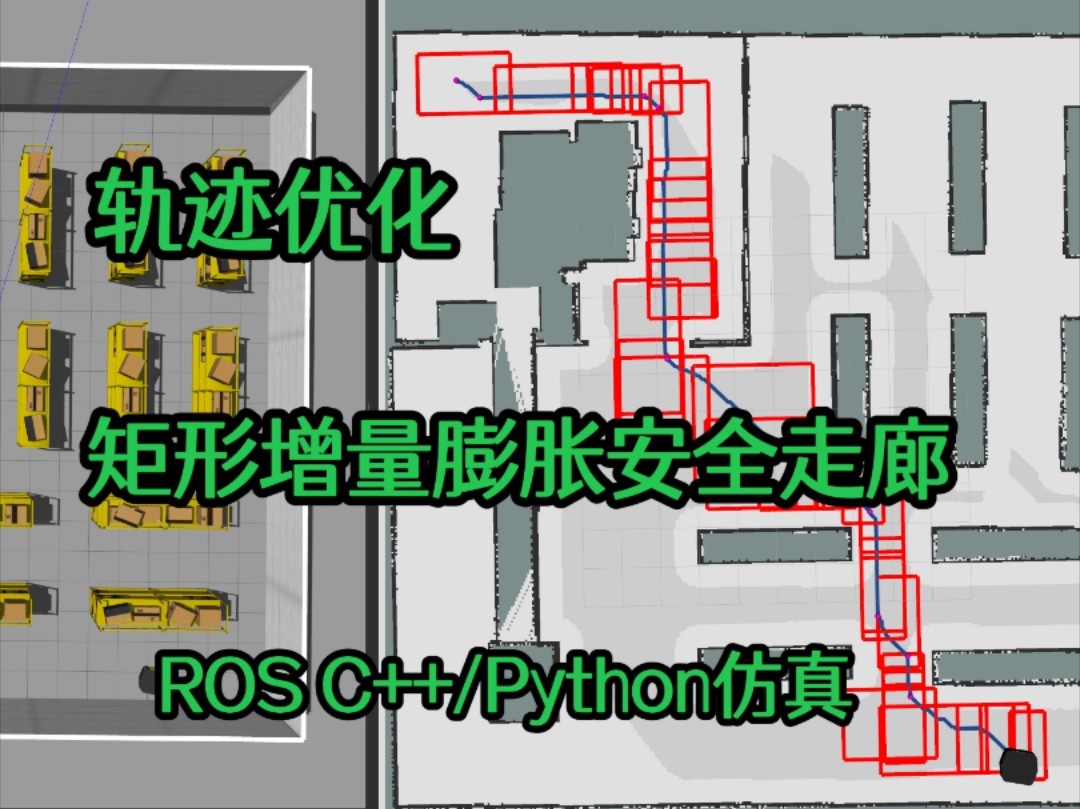
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
发布人
安全走廊在自动驾驶和机器人领域非常重要,其为轨迹优化建模提供了避障约束。本视频介绍了矩形增量膨胀安全走廊的基本生成方法,并通过ROS C++和Python实现算法加深理解
打开封面
下载高清视频
观看高清视频
视频下载器
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
路径规划|比A*快百倍的跳点搜索JPS算法(ROS/Python/Matlab仿真)
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)
路径跟踪|基于PID的局部控制器实现(ROS C++/Python/Matlab)
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
开源!基于A*的路径规划算法(ROS/Python/Matlab实现)
国外网友看机器狼投入战场
第一篇全华班IEEE TRO best paper :分布式快速协同探索多无人机系统RACER
运动规划|无需SLAM的一键建图工具
天塌了,20届智能车赛成为最后的绝唱
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
路径规划|更平滑的Theta*算法(ROS C++/Python/Matlab)
基于2D激光雷达的行人检测
当宇树go1端起M72火箭筒,美国机械狗架起步枪,俄罗斯连夜发布自产军用机械狗
讲座 | 自动驾驶中将轨迹和高精地图统一的环境表达方式——香港城市大学助理教授张祎凡
微信短剧机器人 | 夸克网盘对接源码搭建教程(欧意源码网)
有个说法:“「递归」是检验编程天赋的试金石”;而本视频打破天赋壁垒,助你快速掌握递归。
大模型时代下的端到端自动驾驶(上篇)
宇树L2 雷达提升200%性能,室内外3D扫描无所不能
【Python自动刷题】你们要的学习通自动刷题脚本来了!Python自动答题脚本,准确率100%。举一反三,各类刷题都不愁!
前端 React18 底层源码实战教程(2024最新版)
冒死上传!这个【MATLAB神经网络和优化算法】教程!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
免费分享,逆变器技术设计文档、LVRT技术文档、软件开发逆变器算法文档
【小说党福音】Python爬虫实现全网小说爬取,轻松实现小说自由,附源码!
从零开始刷力扣学C++——第三题:无重复字符的最长子串
花两千多买的vue教程,从零实现最新完整Vue3.4源码(附源码)
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
兔子:关于机器狗,首先,我三年前警告过你们
【大麦网抢票】Python自动购票脚本,准点原价购买演唱会门票,拒绝黄牛从我做起!(附源码)
机器狼现身珠海,断崖式领先。
【附源码】Python独家脚本秘籍,淘宝、京东抢购秒杀脚本,准点自动抢购商品成功率高达100%
最新的Cofounder AI 编码能否胜过 v0、Cursor、Bolt.new??
Tik Tok博主谈论国内全地形越野机器人,国外网友说“星际大战”离我们越来越近
强推!从入门到精通CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!比刷剧还爽!
外网看我国各类蜘蛛机器人评论
【Java项目】仅用两小时,带你快速掌握Java图书管理系统的构建技巧,包含源码和课件,手把手指导开发!