V
主页
京东 11.11 红包
LQR方法 正03 状态反馈的ARE解
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
LQR方法 正02 解的存在条件
LQR方法 正01 基本原理
LQR方法 正04 综合例题与解分析
状态反馈方法 正03 状态反馈的图解形式
状态反馈方法 正02 状态反馈的基本理论
状态反馈方法 正04 能控性条件
状态反馈方法 正07 全维状态反馈的图解例子
PID方法02 PID的基本思想
状态反馈方法 正08 不能控性条件的例子
状态反馈方法 正01 状态反馈的基本思想
状态反馈方法 正05 能控性条件的证明
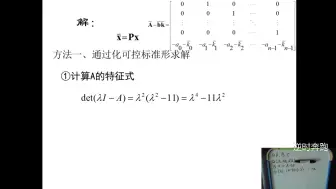
状态反馈方法 正06 全维状态反馈的解A-BK
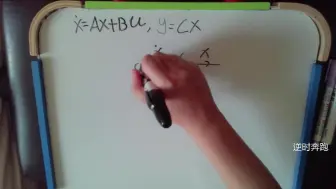
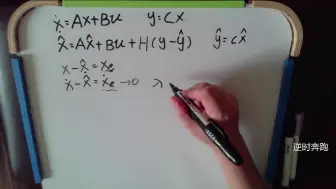
全维观测器-正02观测器结构
状态反馈方法 正09 全维状态反馈的综合
全维观测器-正05 观测与控制综合器
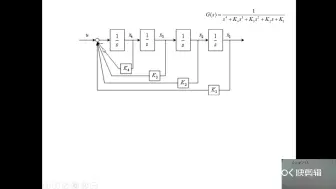
PID方法01 PID的基本结构
全维观测器-正04 基本算例
PID方法03 PID的计算方法
李雅普诺夫稳定性理 正13 LYP第二方法的一般性示例
PID方法04 PID的物理意义
李雅普诺夫稳定性理 正05 稳定性的定义
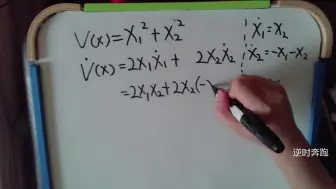
李雅普诺夫稳定性理 正14 LYP第二方法的综合示例
李雅普诺夫稳定性理 正12 LYP第二方法的一般性解
全维观测器-正03 收敛性条件
李雅普诺夫稳定性理 正04 平衡状态与求解
李雅普诺夫稳定性理 正08 【LPY】基本原理
PID方法05 柴油机起动控制例子-要素分析
PID方法06 柴油机起动控制例子-策略
李雅普诺夫稳定性理论 引03 能控能观性实践
【根轨迹7】起始角和终止角
李雅普诺夫稳定性理 正01 BIBO稳定性
李雅普诺夫稳定性理 正06 稳定性之补充
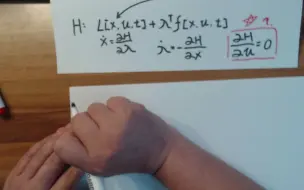
【最优控制速成4】极小值原理
【最优控制速成0】最速降线问题
全维观测器-正01 基本原理
【最优控制速成1】H方程求解静态优化问题
李雅普诺夫稳定性理 正10 定理的判据与实例
【最优控制速成6】Bang-Bang综合解
公开课抓亮点有逻辑。合理的内容加出彩的呈现方式
永磁无刷空心杯电机2D和3D建模和空载仿真