V
主页
京东 11.11 红包
PID方法05 柴油机起动控制例子-要素分析
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
PID方法06 柴油机起动控制例子-策略
PID方法07 柴油机起动控制例子-解决方案
PID方法02 PID的基本思想
PID方法01 PID的基本结构
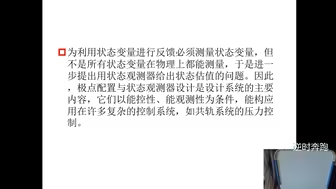
全维观测器-正05 观测与控制综合器
PID方法03 PID的计算方法
PID方法04 PID的物理意义
LQR方法 正02 解的存在条件
状态反馈方法 正07 全维状态反馈的图解例子
状态反馈方法 正08 不能控性条件的例子
状态反馈方法 正05 能控性条件的证明
LQR方法 正01 基本原理
状态反馈方法 正03 状态反馈的图解形式
全维观测器-正04 基本算例
LQR方法 正04 综合例题与解分析
状态反馈方法 正04 能控性条件
状态反馈方法 正02 状态反馈的基本理论
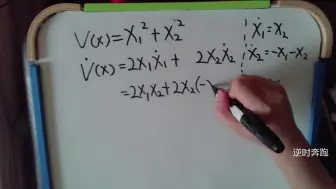
李雅普诺夫稳定性理 正13 LYP第二方法的一般性示例
状态反馈方法 正01 状态反馈的基本思想
李雅普诺夫稳定性理 正11 判定定理的其他情况
李雅普诺夫稳定性理 正01 BIBO稳定性
李雅普诺夫稳定性理 正05 稳定性的定义
李雅普诺夫稳定性理 正12 LYP第二方法的一般性解
全维观测器-正01 基本原理
状态反馈方法 正09 全维状态反馈的综合
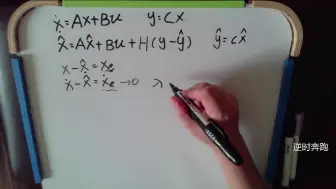
全维观测器-正02观测器结构
LQR方法 正03 状态反馈的ARE解
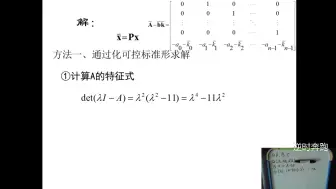
状态反馈方法 正06 全维状态反馈的解A-BK
PID控制是什么黑科技?这下明白了
李雅普诺夫稳定性理 正06 稳定性之补充
全维观测器-正03 收敛性条件
【最优控制速成1】H方程求解静态优化问题
李雅普诺夫稳定性理 正10 定理的判据与实例
我选我的大学之强基计划
【最优控制速成3】变分法的H函数差别
李雅普诺夫稳定性理 正14 LYP第二方法的综合示例
李雅普诺夫稳定性理 正04 平衡状态与求解
【北京学院-自控补习 内容3——传递函数与方框图1】20200528-155940549
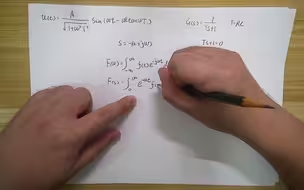
【频率响应3】s=jw
【根轨迹7】起始角和终止角