V
主页
京东 11.11 红包
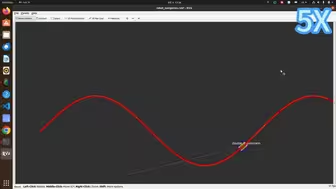
在flatland中使用双阿克曼模型进行路径规划与跟踪
发布人
实现线性插值,贝塞尔曲线和minimum-jerk多项式轨迹生成,并且用PP(Pure Pursuit)算法进行追踪
打开封面
下载高清视频
观看高清视频
视频下载器
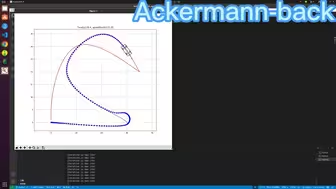
双阿克曼小车基于简易线性MPC的曲线路径追踪仿真
阿克曼和双阿克曼小车MPC轨迹追踪简易仿真
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
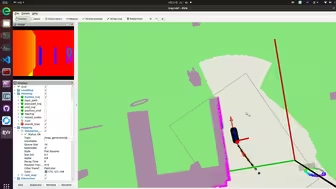
在flatland中实现阿克曼和双阿克曼机器人仿真
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
3基于采样的最优路径规划算法
视觉组 | YOLO自瞄终于能打中了
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
2D Fast-Planner+MPC跟踪+Perception Aware
ROS控制 | 第一轮控制功能包讲解
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
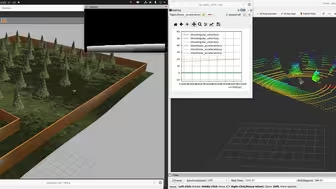
户外环境下的Gazebo差分机器人仿真
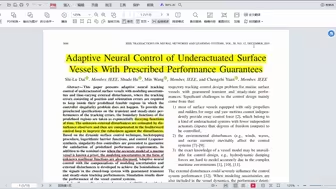
基于神经网络的船舶轨迹跟踪自适应滑模控制【附参考文献】
ROS控制 | 第一轮导航代码讲解
基于MATLAB/simulink的B样条曲线路径规划自动平行泊车
03_路径发布节点解读-1
240927智慧社区第一期ROS培训
把玩 HybridAstar -- 双向搜索初步
ROS2功能包与三大通信机制编程
ROS图像 | 图像目标检测模型训练教程
法奥FR3 物块抓取案例 ROS MoveIt
【开源教程】ROS+PX4开源机械臂控制(下)
成为机器人专家的第一步:掌握这3个前提条件 🤖
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
分享几个ROS简单的脚本
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
【开源教程】ROS+PX4开源机械臂控制(上)
01_案例展示
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
03_路径发布节点解读-2
02_launch文件解读
04_PID改进讲解-1
H743 ROS开发验证板
未知环境在线运动规划
Matlab玩家狂喜!!!纵享丝滑~
定制手持SLAM设备,真的可以很实惠
ROS控制 | 第一轮导航代码使用和计时器使用讲解
【开源教程】ROS基础例程详解