V
主页
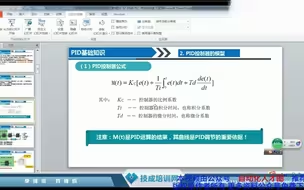
第32课时.PID基础知识
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
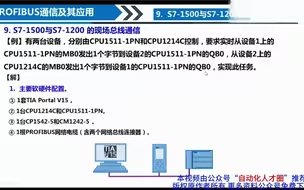
第05课时.PROFIBUS通信及其应用02
32.S7-1200 MM440 USS通讯b
第35课时.S7-1500PLC的PID控制实例
27.S7-1200 PID调节a
32.S7-1200 MM440 USS通讯a
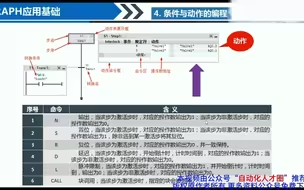
第46课时.GRAPH应用基础
第16课时.通过模块通道的LED灯诊断故障
27.S7-1200 PID调节b
37.S7-1200运动控制案例(一)b
30.S7-1200 MODBUS通讯第一讲b
第31课时.DI-16-HF模块高速计数应用举例
第20讲 KUKA机器人调用当前位置变量
第19课时.通过PLC的显示屏诊断故障
第29课时.工艺模块的组态过程
S7-1200 Modbus RTU通信(2)-编写从站程序
32 发那科机器人位置寄存器的使用
31.S7-1200 MODBUS通讯第二讲a
第20课时.通过用户程序诊断故障
31.S7-1200 MODBUS通讯第二讲b
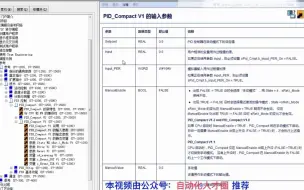
S7-1200的PID控制器概述a
30.S7-1200 MODBUS通讯第一讲a
第28课时.S7-1500PLC计数不测量基础
第02讲 KUKA机器人变量
第34课时.S7-1500PLC的PID参数整定
第07课时.以太网通信基础知识
第27讲 KUKA机器人配置自动模式
29.S7-1200 以太网通讯第二讲a
24.S7-1200 中断第二讲b
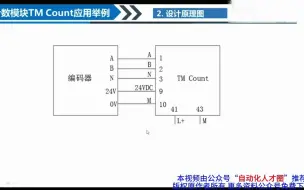
第30课时.高速计数模块TMCount应用举例
16_4KUKA机器人外部自动运行
35.S7-1200运动控制第三讲b
第21课时.通过报警程序诊断故障
S7-1200 Modbus RTU通信(3)-编写主站程序
第25课时.通过Automation-Tool诊断故障
10_11KUKA机器人主程序对子程序的调用
2.基本指令
第22课时.在HMI上通过调用诊断控件诊断故障
33.S7-1200 运动控制第一讲a
第14课时.S7-1500PLC的系统故障诊断原理