V
主页
【自动驾驶100问】第二十问:自动驾驶中的感知系统
发布人
UP是《学习OpenCV4:基于Python的算法实战》和《深度学习计算机视觉实战》两本图书的作者,目前从事自动驾驶感知融合与SLAM建图算法开发,分享内容包括深度学习、计算机视觉、OpenCV、自动驾驶、SLAM、C++/Python语言开发等方向的内容。 欢迎关注公众号“计算机视觉与OpenCV”(分享内容会发在这里) 欢迎添加我的微信号study428讨论交流。
打开封面
下载高清视频
观看高清视频
视频下载器
【自动驾驶100问】自动驾驶算法应该如何入门
【C++面试100问】第九十九问:char*和char[]的区别是什么
2050,张伟的一天
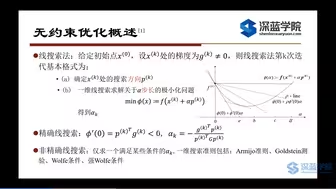
【自动驾驶100问】第一问:四元数在表示空间旋转时的优势是什么?
【C++面试100问】第一问:include双引号与尖括号的区别是什么?
【自动驾驶基础】坐标系变换
SLAM学习路线分享
22年十佳开源SLAM算法
视觉SLAM进阶-从零开始手写VIO
【自动驾驶100问】第十六问:PnP算法介绍
【自动驾驶100问】第十二问:旋转矩阵和变换矩阵的区别是什么
【C++面试100问】第六问:内存泄漏是什么,有哪几种,怎么解决?
【自动驾驶基础】自动驾驶路线图分享
【C++面试100问】第七问:new/delete与malloc/free的区别是什么?
自己组装一台巡检机器人需要多少银两?
【C++面试100问】第八十九问:什么时候用指针传参?什么时候用引用传参?
【自动驾驶100问】第十问:点云配准是什么
【C++面试100问】第八问:什么是运行时多态?
超级详细的C++方向技术栈
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
【自动驾驶100问】第八问:回环检测方法介绍
视觉SLAM VIO开源代码解析
【C++面试100问】第九问:哈希表的原理是什么?
【自动驾驶100问】第十九问:IMU介绍
【C++面试100问】第九十二问:#pragma once与#ifndef的区别是什么
【深度学习100问】第一问:超参数有哪些,如何调优?
自动驾驶学什么
【自动驾驶100问】第十七问:SLAM学习路线分享
【C++面试100问】第六十七问:C/C++中字符串与数字如何互转?
【自动驾驶100问】番外一:自动驾驶岗位介绍
【C++面试100问】第五十四问:移动构造函数是什么?
【C++面试100问】第八十五问:有了const,C++11为什么还要引入constexpr
【自动驾驶100问】第二十八问:相机畸变描述与校正详述
SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
【C++面试100问】第九十五问:main函数执行前后做了什么?
【C++面试100问】第二十八问:C++中的多态是什么样的?
这些学好了,才算是真正的打下了扎实的C++基础
多旋翼无人机使用多相机SLAM同时定位
【C++面试100问】第四十问:C++中什么是完美转发?什么是万能引用?
【C++面试100问】第八十问:拷贝构造函数的第一个参数为什么要是引用类型?