V
主页
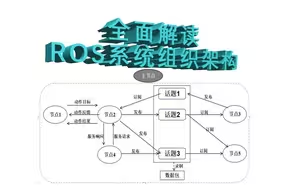
【机器人操作系统】ROS本质上就是一个分布式通信框架
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人操作系统】全面解读ROS系统组织架构
《机器人SLAM导航核心技术与实战》书籍配套教学视频
《松灵ROS 2开讲啦》第六期 Nav2导航应用
【自制展示】+SLAM导航语音交互ROS机器人DIY+miiboo机器人组装教程
【一看就懂】SLAM算法原理通俗解读
粒子滤波的本质
【激光SLAM专题】LOAM原理通俗易懂
【史上最全】一图读懂机器人SLAM核心技术
【机器人操作系统】学会ROS就学会机器人开发了吗
SLAM算法你真的了解吗
【3分钟】快速了解SLAM算法的本质
【通俗易懂】SLAM实现导航的完整过程演示
C++、ROS和SLAM是什么关系
机器人分布式主机是什么
【激光SLAM专题】Cartographer如何运行
SLAM算法快速入门
【新手必备】SLAM学习路线图
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
【机器人操作系统】ROS与ROS2.0区别是什么
【功能演示】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
【全网最详细】摄像头原理分析
2025工创赛物流搬运机器人 赛事解读与问题分析2
一本书打通机器人SLAM导航中的软件技术、硬件技术、数学理论、工程落地等一系列问题。
【全网最详细】RGB-D相机原理分析
【机器人操作系统】ROS究竟是个啥
机器人底盘为什么是核心技术
最大似然、最小二乘和贝叶斯估计的区别
【自己搭建机器人】主机选择
机器人底盘两轮差速模型演变过程
SLAM算法的本质数据关联
机器人SLAM导航为什么需要轨迹跟踪
双目相机如何标定
机器人底盘开发很简单吗
SLAM算法实现为何基于ROS接口
【本质揭秘】超声波SLAM原理解读
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
机器人中的摄像头传感器
SLAM算法的底层框架概率图模型
四足机器人运动学入门 | 云深处 2024 ROS 暑期学校
【自己搭建机器人】底盘硬件系统搭建