V
主页
SLAM算法的本质数据关联
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
SLAM算法的底层框架概率图模型
SLAM技术是伪需求吗
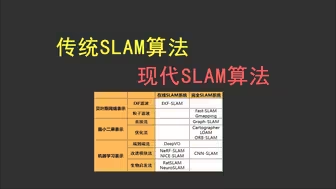
SLAM算法有哪些
SLAM算法你真的了解吗
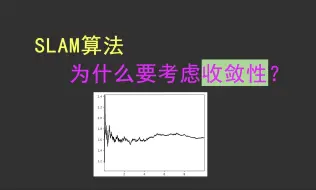
SLAM算法为什么要考虑收敛性
ORB-SLAM3有必要学吗
【激光SLAM专题】GMapping原理通俗易懂
多传感器融合的本质
SLAM算法基本理论梳理
搞SLAM算法为什么要学李群和李代数
SLAM问题的起源你不一定知道
机器人底盘为什么是核心技术
树莓派是什么替代方案有哪些
搞机器人开发需要懂硬件吗
先学激光SLAM还是先学视觉SLAM
【3D数学】认识欧拉角
【自己搭建机器人】底盘硬件系统搭建
机器人底盘两轮差速模型演变过程
视觉SLAM算法特征点法详解
激光SLAM算法有哪些
自研机器人底盘里程计精度如何选择
【机器人关键技术】利用摄像头定位、建图、避障的原理解读
IMU的数据为什么要滤波
端到端里程碑任务!UniAD算法详解来啦
【激光SLAM专题】GMapping如何运行
激光雷达畸变校准
双目相机如何读取图像数据
机器人SLAM为什么需要编码器
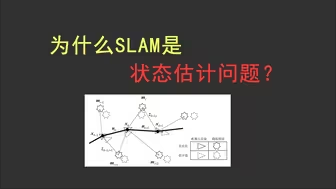
为什么SLAM是状态估计问题
最大似然、最小二乘和贝叶斯估计的区别
SLAM中的概率观测模型
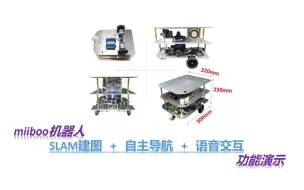
【功能演示】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
粒子滤波的本质
【3D数学】欧拉角万向节死锁与插值
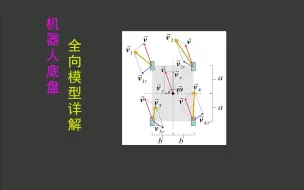
机器人底盘全向模型详解
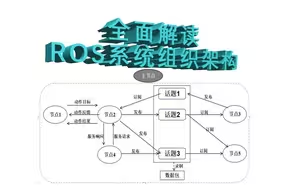
【机器人操作系统】全面解读ROS系统组织架构
自研机器人底盘控制精度如何选择
IMU的数据如何采集
IMU如何测加速度
【全网最详细】摄像头原理分析