V
主页
自动驾驶深度强化学习-前言课
发布人
自动驾驶深度强化学习课程上新,敬请期待
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
985博士带你玩转自动驾驶决策-carla等平台强化学习效果演示
基于深度强化学习的自动驾驶决策仿真(Highway-env)
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
直播回放-自动驾驶决策规划基础Apollo-Lattice算法强化学习决策基础
自动驾驶多智能体深度强化学习-入门知识
08大模型全栈-强化学习01-RLHF前言传统强化学习
自动驾驶深度强化学习-HighwayEnv安装使用
零基础学习强化学习算法:ppo
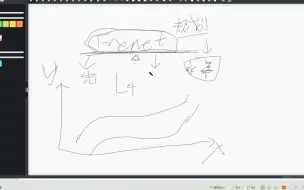
10.28直播回放:入门简单搭建自动驾驶规划场景思路和经典的Frenet规划讲解
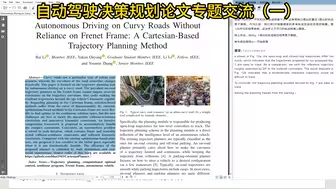
自动驾驶决策规划论文专题交流(一)
09大模型全栈-强化学习02-RLHF前言LLM强化学习
深度强化学习--经典算法
自动驾驶路径规划-Lanelet教程
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
太牛了!颠覆传统【深度强化学习】,被应用于多个经典强化学习算法中的异步强化学习方法究竟有何跨时代意义?一篇论文解析告诉你!!!
深度强化学习算法carla平台实战-PPO算法
自动驾驶carla ros仿真Apollo移植算法调试
12大模型全栈-强化学习05-RLHF实战-端到端全流程解决方案-轩辕大模型强化学习完整流程介绍(数据+奖励模型+强化学习调参经验)
ROS-Carla泊车停车场联合仿真过程步骤讲解
多智能体强化学习highway平台实战-maddpg算法
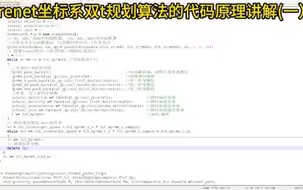
Frenet坐标系双t规划算法的代码原理讲解(一)
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶路径规划-控制决策入门学习
自动驾驶规划控制算法工程更新简介
11.11直播回放-DWA算法基本思想分享
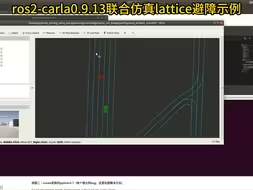
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattice避障示例
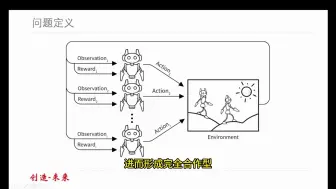
什么是强化学习?它的基本概念是什么?
Lanelet教程-JOSM画图补充注意点
14大模型全栈-强化学习07-DPO原理公式推导
16大模型全栈-强化学习09-DPO变体:TDPO:更细粒度控制的DPO;RPO:带有离线奖励的DPO
进来看看吧!零基础入门【王树森深度强化学习】完整版教程,含配套项目代码—王树森、深度强化学习、人工智能、深度学习、强化学习
自动驾驶规控学习之--OpenPlanner-停障等功能演示
从零开始学习自动驾驶决策规划实战基础教程介绍
自动驾驶决策规划-混合A星停车场新增地图说明
自动驾驶路径规划ros-carla联合仿真使用
不愧是王树森老师讲的【深度强化学习】,零基础入门到实战完整版教程!—DRL、深度强化学习、强化学习、王树森、计算机技术
自动驾驶路径规划-控制决策入门学习
自动驾驶规划算法入门实战学习-teb规划算法的应用
carla交叉口动态避障