V
主页
京东 11.11 红包
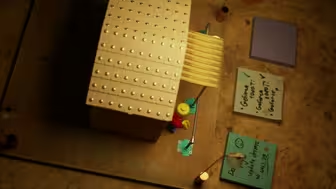
超越极限跑酷:仿真强化学习,塑造腿式机器人运动未来
发布人
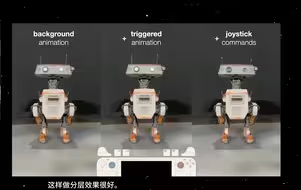
本视频由ETH Zurich的机器人学教授Marco Hutter主讲,探讨了近年来腿式机器人领域的显著进步以及四足系统在现实世界中的应用。随着硬件系统的巨大改进,多家公司已将腿式机器人发展成坚固耐用的认证产品。同时,感知、导航规划以及用于运动控制的强化学习(RL)技术的最新发展,为机器人在复杂地形中的移动和自主性带来了全新的水平。 视频中,Hutter教授将展示NVIDIA与ETH Zurich的合作成果,他们利用NVIDIA的Isaac仿真工具结合强化学习,成功实现了四足机器人在类似跑酷环境中的全身运动操控。此外,还将探讨处理感知问题的新颖思路,以及如何将这些方法扩展到自主导航领域。 通过本视频,观众将深入了解腿式机器人技术的最新进展,以及仿真与强化学习如何携手推动这一领域的边界。 https://www.nvidia.com/en-us/on-demand/session/gtc24-s63140
打开封面
下载高清视频
观看高清视频
视频下载器
使用Isaac Sim OmniDrones进行无人机集群训练
超越人类极限:自主视觉无人机的革命性突破
迪士尼幻想工程揭秘:BD-X系列机器人震撼登场!重塑娱乐机器人未来,深度学习与动画艺术的完美交融
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
具身智能常用AI工具-必看
生成式 AI 引领 3D 工作流的未来
AlignBot:个性化具身大模型
Mentee Robotics公司公开分享他们对下一代人形机器人的创新和思考
北航王田苗:具身智能的可持续发展路径需要底层创新与应用场景迭代
Custom Robot in 15 min Nvidia Issac Sim
Haptic-ACT: Bridging Human Intuition with Compliant Robotic Manipulation via Imm
AI新纪元:生成式AI如何重塑机器人未来
Omniverse加速自行车设计
【具身论文阅读】Diffuser: 基于diffusion的强化学习规划器
具身智能传感器同步秘籍:精准对齐摄像头与激光雷达数据
Isaac Sim导航网格和人体动画展示
强化学习框架-Legged Gym 训练代码详解
灵巧手遥操作
NVIDIA Isaac:解锁AI机器人潜能,引领全球自动化革命
腾讯张正友:具身智能涉及多学科融合,是所有领域发展到一定成熟度之后才能涌现的能力
使用Nvidia Omniverse Isaac Sim开发的新型月球模拟器
NVIDIA Omniverse 让虚拟世界栩栩如生!
【具身论文阅读】视触联觉灵巧手操作
【具身论文阅读】通用的视触觉的灵巧手操作
如何在Nvidia Omniverse里驾驶一辆仿真车辆
NVIDIA Omniverse Demo Reel
NVIDIA Project Groot利用基础模型推进具身智能
Isaac Sim ROS 工作流程
路特斯引领未来:实时3D和人工智能在汽车行业的创新应用
一键生成超写实3D角色:AI技术的革命性突破
NVIDIA Isaac Sim生态系统合作伙伴作品展示 | 2023年6月
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
在家作AI,昨天780,一台电脑,操作简单,分享我的接单平台,接单技巧和资源分享,目前经济自由!!
在家做AI后,昨天922,一台电脑,操作简单,分享我的AI实战操作,接单平台和资源分享,悄悄努力,惊艳所有人!!
NVIDIA GROOT 一场具身AGI革命
【科研自救指南】同济大佬手把手教你如何高效阅读文献及笔记整理-SCI论文、顶会论文、文献阅读
从Nvidia的历史带你解读为什么Nvidia是世界最有价值的公司
记录从零驯服双足机器人day27
NVIDIA Omniverse 生成式 AI 助力交互式数字人全流程开发
转个魔方